Калиброванные круги: Круги калиброванные | ЭнергоСталь
Содержание
Калиброванный прокат, круг из легированной конструкционной стали
Описание
Еще одна из профильно производимых ООО «Константиновский метизный завод» групп товаров — качественная конструкционная легированная калиброванная сталь круглого сечения (круг калиброванный) марок 15Х, 20Х, 35Х, 40Х, 45Х, 18ХГТ, 25ХГТ и др. Изготовливается в соответствии с требованиями ДСТУ 8608:2015 (взамен ГОСТ 7417-75, прокат калиброванный круглого сечения, сортамент), ДСТУ 7806:2015 (взамен ГОСТ 4543-71, прокат из легированной конструкционной стали), состояние – нагартованная. Для кругов диаметрами до 30 мм. возможна поставка в отожженном состоянии, либо с нормируемой твердостью.
Калиброванный прокат круглого сечения (калиброванный круг) характеризуется приведенными ниже основными параметрами:
- Размер калиброванного круга, который подразумевает под собой диаметр сечения (окружности). Измеряется и прописывается в миллиметрах;
- Калиброванный прокат круглого сечения (круг калиброванный) имеет сортовой квалитет, который обозначается латинской буквой «h» и цифрой справа от 9 до 12.
 Чем меньше цифра, тем жестче допуски к размеру и калиброванный круг точнее в геометрических показателях своего сечения. Измеряется в сотых долях миллиметра.
Чем меньше цифра, тем жестче допуски к размеру и калиброванный круг точнее в геометрических показателях своего сечения. Измеряется в сотых долях миллиметра. - Наличие дефектов поверхности (как-то, волосовины, риски, остатки окалины, трещины и т.п.) строго регламентировано и в зависимости от их количества и характера определяет группу качества поверхности калиброванного проката (для групп калиброванный круг, квадрат и шестигранник). Группы обозначаются заглавными буквами кириллицы и от высшей к низшей бывают приведенных видов А, Б, В.
- Состояние поставки. Калиброванный прокат (круг, шестигранник и квадрат) в основном и по умолчанию поставляется в нагартованном состоянии. Это состояние приобретается при холодном волочении, придающем прокату особые механические свойства. Речь о более высокой прочности и твердости, которая, к тому же неравномерно распределяется в толще проката. Для изменения этих свойств и достижения необходимых применяют разные режимы термообработки, как-то светлый и темный отжиги, нормализация, отпуск, сфероиодизирующий отжиг и т.
 д. и т.п. После прохождения этих процедур калиброванный прокат меняет состояние поставки на «отожженный» или «термообработанный».
д. и т.п. После прохождения этих процедур калиброванный прокат меняет состояние поставки на «отожженный» или «термообработанный». - Длина проката. Калиброванный прокат круглого сечения может поставляться в прутках немерной и мерной длин, а также в мотках (бухтах, бунтах)Измеряется в мм и подразумевает под собой длину отдельно взятой штанги из партии металлопроката (в случае поставки в прутках). Показатели длин также строго регламентированы нормативными документами (вкладка «нормативная документация»).
 Чем меньше цифра, тем жестче допуски к размеру и калиброванный круг точнее в геометрических показателях своего сечения. Измеряется в сотых долях миллиметра.
Чем меньше цифра, тем жестче допуски к размеру и калиброванный круг точнее в геометрических показателях своего сечения. Измеряется в сотых долях миллиметра.
Качество каждой партии производимой продукции подтверждается сертификатами центральной заводской лаборатории. Подробнее: https://kmztov.com/kachestvo-i-sertifikacziya/
Характеристики
| Диаметр сечения | от 4 мм. до 45 мм. |
| Марки стали | 15Х, 20Х, 35Х, 40Х, 45Х, 18ХГТ, 25ХГТ и др. |
| Доступные сортовые квалитеты | h20, h21, h22 |
| Доступные группы качества поверхности | Б, В |
| Поставка в нагартованном состоянии | круги диаметрами сечений от 4 мм.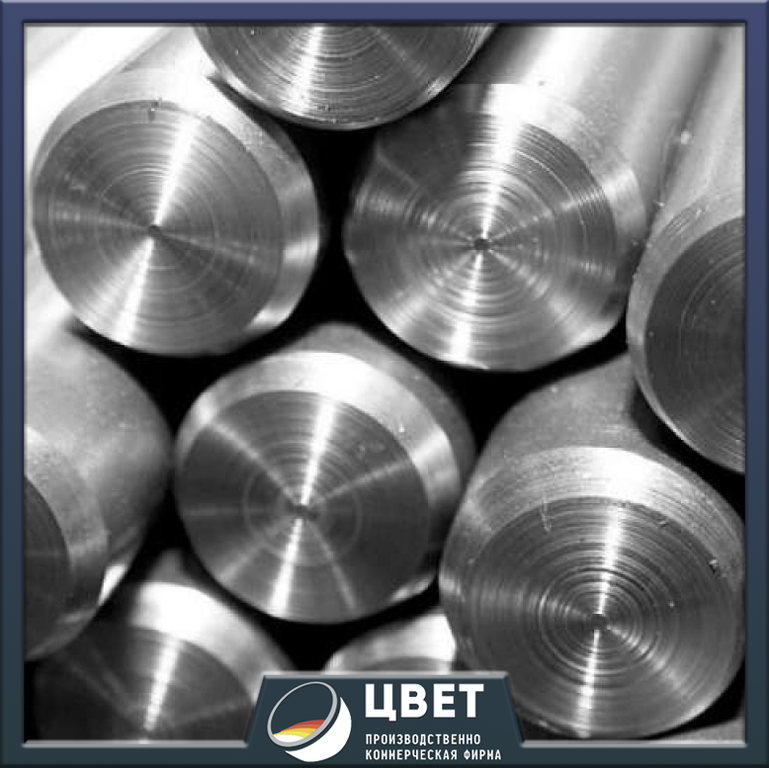 до 45 мм. до 45 мм. |
| Поставка в отожженном состоянии | круги диаметрами сечений от 4 мм. до 30 мм. |
| Поставка с нормируемой твердостью | круги диаметрами сечений от 4 мм. до 30 мм. |
| Поставка в мотках | круги диаметрами сечений от 4 мм. до 15 мм. |
| Поставка в прутках мерной (кратной) длины | круги диаметрами сечений от 4 мм. до 30 мм. |
| Поставка в прутках н/дл. | круги диаметрами сечений от 4 мм. до 45 мм. |
0331100012415000148 металлопрокат (круги калиброванные, круги конструкционные)
×
Бесплатный период истек
Избранное, цветные метки и изменения в избранных закупках
доступны на тарифах Стандарт и Эксперт.
Выбрать тариф
Закрыть
×
Требуется оплата
Подробные результаты доступны на тарифах Стандарт и Эксперт
Выбрать тариф
Закрыть
×
Произошла ошибка, последние действия не сохранились
Попробуйте снова или обновите страницу
Размещение завершено
- Начальная цена контракта
-
440 776,62 ₽
Контактные данные
Порядок размещения
44-ФЗ, Закупка у единственного поставщика (подрядчика, исполнителя)
Перейти на ЕИС
Заказчик
Федеральное казенное учреждение «Исправительная Колония № 1 Управления Федеральной Службы Исполнения Наказаний по Воронежской Области»
ИНН 3628007010
КПП 362801001
Анализ заказчика
Все закупки заказчика
Объекты закупки
Контракты с поставщиком
|
|
|
|
|
|
|
|
|
 09.2015
09.2015
 11.2015
11.2015
Похожие закупки
-
Выполнение работ по капитальному ремонту сети водоснабжения -
Прямой поиск поставщиков на поставку шлифовальных кругов и войлока по № ПП_8_… -
Поставка товаров по номенклатурной группе: Строительные материалы и принадлеж…
×
Бесплатный период истек
Напоминания доступны на тарифах Стандарт и Эксперт
Выбрать тариф
Закрыть
Объяснение шаблонов калибровки — calib.
 io
io
Точная калибровка камер важна для успеха любой настройки машинного/компьютерного зрения. Тем не менее, есть разные модели на выбор. Чтобы облегчить вам выбор, в этой статье объясняются основные преимущества каждого из них.
Подборка шаблонов калибровки, которые мы предлагаем на Calib.io. CharuCo, шахматная доска, асимметричные круги и шахматная доска.
Размер шаблона
При выборе калибровочной пластины важным фактором является ее физический размер. В конечном итоге это относится к измерению поля зрения (FOV) конечного приложения. Это связано с тем, что камеры должны быть сфокусированы на этом конкретном расстоянии и откалиброваны. Изменение фокусного расстояния незначительно влияет на фокусное расстояние, что может сбить любую предыдущую калибровку. Даже изменения диафрагмы обычно отрицательно сказываются на достоверности калибровки, поэтому их следует избегать.
Для точной калибровки модель камеры лучше всего ограничена, если камера видит цель калибровки, заполняющую большую часть изображения. Говоря популярными, если используется небольшая калибровочная пластина, многие комбинации параметров камеры могут объяснить наблюдаемые изображения. Как правило, калибровочная пластина должна иметь площадь не менее половины доступной площади пикселя при фронтальном наблюдении.
Говоря популярными, если используется небольшая калибровочная пластина, многие комбинации параметров камеры могут объяснить наблюдаемые изображения. Как правило, калибровочная пластина должна иметь площадь не менее половины доступной площади пикселя при фронтальном наблюдении.
Тип шаблона
За прошедшие годы были введены различные шаблоны, каждый из которых имеет уникальные свойства и преимущества.
Выбор правильного типа начинается с рассмотрения того, какой алгоритм и реализацию алгоритма вы будете использовать. В программном обеспечении, таком как калибратор камеры Calib, и библиотеках, таких как libCalib, OpenCV или MVTec Halcon, есть некоторая свобода в отношении шаблона, и они имеют индивидуальные преимущества и ограничения.
Мишени в виде шахматной доски
Это самый популярный и распространенный рисунок. Кандидаты на углы шахматной доски обычно находятся путем бинаризации изображения с камеры и нахождения четырехугольников (это черные поля шахматной доски). На этапе фильтрации сохраняются только те четырехугольники, которые соответствуют определенным критериям размера и организованы в виде обычной сетки, размеры которой соответствуют размерам, указанным пользователем.
На этапе фильтрации сохраняются только те четырехугольники, которые соответствуют определенным критериям размера и организованы в виде обычной сетки, размеры которой соответствуют размерам, указанным пользователем.
После первоначального обнаружения шаблона расположение углов может быть определено с очень высокой точностью. Это связано с тем, что углы (математически: седловые точки) в основном бесконечно малы и, следовательно, не подвержены смещению при преобразовании перспективы или искажении объектива.
В OpenCV вся шахматная доска должна быть видна на всех изображениях, чтобы ее можно было обнаружить. Обычно это затрудняет получение информации с самых краев изображений. Эти области обычно полезны для получения информации, поскольку они должным образом ограничивают модель искажения объектива.
После обнаружения шахматной доски можно выполнить субпиксельное уточнение для поиска седловых точек с точностью до субпикселя. Это использует точные значения серого пикселей вокруг заданной угловой позиции, и точность намного более точна, чем то, что допускают целочисленные положения пикселей.
Важной деталью в отношении целей шахматной доски является то, что для того, чтобы быть инвариантным к вращению, количество строк должно быть четным, а количество столбцов нечетным, или наоборот. Если, например, оба четны, возникает неоднозначность поворота на 180 градусов. Для калибровки одной камеры это не проблема, но если одни и те же точки необходимо идентифицировать двумя или более камерами (для стереокалибровки), такой неоднозначности быть не должно. По этой причине все наши стандартные цели шахматной доски имеют это свойство четных/нечетных строк/столбцов.
Цели CharuCo
Шаблоны CharuCo преодолевают некоторые ограничения классических шахматных досок. Однако алгоритм их обнаружения несколько сложнее. К счастью, обнаружение CharuCo является частью библиотеки Contrib OpenCV (начиная с OpenCV 3.0.0), что позволяет очень легко интегрировать этот продвинутый метод.
Основным преимуществом CharuCo является то, что все поля световой шашки имеют уникальный код и идентифицируются. Это означает, что для калибровки можно использовать даже частично закрытые или неидеальные изображения с камеры. Например, сильные кольцевые огни могут давать неоднородное освещение на калибровочной мишени (область полузеркального отражения), что может привести к сбою обычного обнаружения шахматной доски. С CharuCo все еще можно использовать оставшиеся (хорошие) обнаружения седловой точки. Локализация седловой точки может быть уточнена с помощью обнаружения субпикселей, как в шахматной доске.
Это означает, что для калибровки можно использовать даже частично закрытые или неидеальные изображения с камеры. Например, сильные кольцевые огни могут давать неоднородное освещение на калибровочной мишени (область полузеркального отражения), что может привести к сбою обычного обнаружения шахматной доски. С CharuCo все еще можно использовать оставшиеся (хорошие) обнаружения седловой точки. Локализация седловой точки может быть уточнена с помощью обнаружения субпикселей, как в шахматной доске.
При наблюдениях близко к углам изображения это чрезвычайно полезное свойство. Поскольку цель может быть расположена так, что камера видит ее только частично, мы можем собирать информацию с самых краев и углов изображения с камеры. Обычно это приводит к очень хорошему и надежному определению параметров дисторсии объектива. По этой причине мы настоятельно рекомендуем использовать цели CharuCo, когда доступен OpenCV 3.x.
Естественно, мишени CharuCo можно использовать для стереокалибровки. В этом случае нужно реализовать некоторый код для поиска тех точек, которые были обнаружены в каждой камере по отдельности, и тех, которые были найдены в обеих (пересечение точек).
В этом случае нужно реализовать некоторый код для поиска тех точек, которые были обнаружены в каждой камере по отдельности, и тех, которые были найдены в обеих (пересечение точек).
Цели маркеров шахматной доски
Они основаны на традиционных шахматных досках и могут использовать те же алгоритмы обнаружения. Кроме того, они содержат три круга в центре, что обеспечивает абсолютную привязку даже при частичном просмотре шахматной доски (при условии, что круги видны на всех изображениях). Следовательно, могут быть включены данные с периферии изображения, что гарантирует, что модель подобранной линзы также действительна в этих частях изображения.
Для многих задач стереокалибровки маркерная мишень в виде шахматной доски обладает всеми преимуществами кодированной мишени, такой как ChArUco. Он поддерживается, например. OpenCV 4.5+.
Круговые сетки
Круговые сетки также являются популярным и очень распространенным дизайном калибровочной мишени, основанным на кругах, либо с белыми кругами на темном фоне, либо с темными (черными) кругами на белом фоне. С точки зрения обработки изображений круги могут быть обнаружены как «капли» на изображении. Некоторые простые условия для этих бинарных областей больших двоичных объектов, такие как площадь, округлость, выпуклость и т. д., могут быть применены для удаления плохих кандидатов в функции.
С точки зрения обработки изображений круги могут быть обнаружены как «капли» на изображении. Некоторые простые условия для этих бинарных областей больших двоичных объектов, такие как площадь, округлость, выпуклость и т. д., могут быть применены для удаления плохих кандидатов в функции.
После нахождения подходящих кандидатов обычная структура признаков снова используется для идентификации и фильтрации шаблона. Определение кругов может быть выполнено очень точно, поскольку могут использоваться все пиксели на периферии кругов, что уменьшает влияние шума изображения. Однако, в отличие от седловых точек на шахматной доске, круги изображаются как эллипсы в перспективе камеры. Эту перспективу можно объяснить с помощью ректификации изображения. Однако, кроме того, неизвестное искажение объектива означает, что круги не отображаются как идеальные эллипсы, что добавляет небольшое смещение. Однако мы можем рассматривать модель дисторсии как локально-линейную (подчиняющуюся перспективному преобразованию/гомографии), поэтому в большинстве объективов эта ошибка очень мала.
Для высокоточной калибровки необходимо учитывать как эллиптическую форму, так и центр проецируемой окружности, особенно при использовании объективов с коротким фокусным расстоянием и больших кругов. OpenCV не делает ни того, ни другого и по умолчанию использует простой детектор больших двоичных объектов для поиска центроидов эллиптических двоичных объектов. Calib Camera Calibrator учитывает эти эффекты и может давать более точные результаты для круглых целей.
Важное различие между симметричными и асимметричными сетками кругов заключается в том, что первые имеют 180-градусную неоднозначность, как описано в разделе «Шахматная доска». Следовательно, для стереокалибровки необходимы асимметричные сетки. В противном случае нет большой разницы в производительности, которую следует ожидать для любого типа.
Калибровка камеры с двумя произвольными копланарными кругами
Калибровка камеры с двумя произвольными копланарными кругами
- Qian Chen 16 ,
- Haiyuan Wu 16 и
- Toshikazu Wada 16
- 94 Бумага для конференции
3061 Доступ
58
Цитаты
Часть серии книг Lecture Notes in Computer Science (LNCS, том 3023)
Abstract
В этой статье мы описываем новый метод калибровки камеры для оценки внешних параметров и фокусного расстояния камеры с использованием только одного изображения двух копланарных окружностей произвольного радиуса.
Мы считаем, что метод простой операции для оценки внешних параметров и фокусного расстояния камеры очень важен, потому что во многих приложениях, основанных на зрении, положение, поза и коэффициент масштабирования камеры регулируются часто.
Простой в использовании и удобный метод калибровки камеры должен иметь две характеристики: 1) объект калибровки может быть легко изготовлен или подготовлен, и 2) работа по калибровке проста и легка. Наш новый метод удовлетворяет этому требованию, в то время как большинство существующих методов калибровки камеры не удовлетворяют, потому что для них требуется специально разработанный калибровочный объект и требуются многоракурсные изображения. Поскольку рисовать красивые круги произвольного радиуса настолько просто, что их можно нарисовать даже на земле, используя только веревку и палку, калибровочный объект, используемый в нашем методе, может быть подготовлен очень легко. С другой стороны, нашему методу требуется только одно изображение, и он позволяет закрывать центры кругов и/или часть кругов.
Еще одна полезная особенность нашего метода заключается в том, что он может одновременно оценивать фокусное расстояние и внешние параметры камеры. Это связано с тем, что зум-объективы используются очень широко, а коэффициент масштабирования регулируется так же часто, как и настройки камеры, поэтому оценка фокусного расстояния является почти обязательной при каждом изменении настроек камеры. Обширные эксперименты с смоделированными изображениями и реальными изображениями демонстрируют надежность и эффективность нашего метода.
Скачать документ конференции в формате PDF
Ссылки
Фожерас, О.: Трехмерное компьютерное зрение: геометрическая точка зрения. MIT Press, Кембридж (1993)
Google ученый
Мэн, X., Ху, З.: Новый простой метод калибровки камеры на основе круговых точек.
 Распознавание образов 36, 1155–1164 (2003)
Распознавание образов 36, 1155–1164 (2003)CrossRef
МАТЕМАТИКАGoogle ученый
Ван, Г., Ву, Ф., Ху, З.: Новый подход к калибровке камеры по круговым точкам
Google ученый
Ким, Дж. С., Ким, Х. В., Квеон, И. С.: Метод калибровки камеры с использованием концентрических кругов для приложений машинного зрения. В: ACCV, стр. 23–25 (2002)
.
Google ученыйЯн, К., Сун, Ф., Ху, З.: Калибровка плоской конической камеры. В: МКЗР (2000)
Google ученый
Гурджос, П., Гроузил, А., Пайриссат, Р.: Другой взгляд на калибровку на основе плоскости: ограничение по центральной окружности. В: Heyden, A., Sparr, G., Nielsen, M., Johansen, P. (eds.) ECCV 2002. LNCS, vol.
 2353, стр. 252–266. Springer, Heidelberg (2002)
2353, стр. 252–266. Springer, Heidelberg (2002)CrossRef
Google ученый
Лонг, Q.: Коническая реконструкция и соответствие с двух точек зрения. ПАМИ 18(2), 151–160 (1996)
Google ученый
Доум, М., Лапрест, Дж. Т., Ривз, Г., Ришетин, М.: Пространственная локализация смоделированных объектов вращения в монокулярном перспективном видении. В: Faugeras, O. (ed.) ECCV 1990. LNCS, vol. 427, стр. 475–485. Springer, Heidelberg (1990)
CrossRef
Google ученый
Авидан С., Шашуа А.: Триангуляция траектории: трехмерная реконструкция движущихся точек из последовательности монокулярных изображений. ПАМИ 22(4), 348–357 (2000)
Google ученый
Хейккила Дж., Сильвен О.: Четырехэтапная процедура калибровки камеры с неявной коррекцией изображения
Google ученый
 «>
«>Форсайт, Д. и др.: Инвариантные дескрипторы для распознавания и позы трехмерных объектов. IEEE. Транс. ПАМИ 13, 971–991 (1991)
Google ученый
Ротвелл, К.А., и др.: Относительное движение и поза из произвольных плоских кривых. Изображение Виз. вычисл. 10(4), 250–262 (1992)
Перекрёстная ссылка
Google ученый
Safaee-Red, R., et al.: Ограничения на элементы квадратной кривизны при перспективной проекции. Изображение Виз. вычисл. 19(8), 532–548 (1992)
CrossRef
Google ученый
Safaee-Red, R., et al.: Трехмерная оценка местоположения круговых объектов для машинного зрения. IEEE транс. Робот Автомат. 8(5), 624–640 (1992)
Перекрёстная ссылка
Google ученый
 «>
«>Канатани, К., Ву, Л.: Трехмерная интерпретация коник и ортогональности. Понимание изображений 58, 286–301 (1993)
Google ученый
Ву, Л., Канатани, К.: Интерпретация конического движения и его применения. Междунар. Journal of Computer Vision 10(1), 67–84 (1993)
CrossRef
Google ученый
Штурм, П.: Дело против уравнений Круппа для самокалибровки камеры. ПАМИ 22(10), 348–357 (2000)
Google ученый
Суктанкар, Р., Стоктон, Р., Маллин, М.: Умные презентации: использование гомографии в камера-проекторных системах. В: ICCV, стр. 247–253 (2001)
.
Google ученыйХолт, Р.Дж., Нетравали, А.Н.: Проблема калибровки камеры: новый результат. ЦВИУ 54(3), 368–383 (1991)
МАТЕМАТИКА
Google ученый
 «>
«>Чжан, З.: Новая гибкая методика калибровки камеры. ПАМИ 22(11), 1330–1334 (2000)
Google ученый
Штурм, П., Мэйбэнк, С.: Калибровка плоской камеры: общий алгоритм, особенности, приложения. В: CVPR, стр. 432–437 (1999)
.
Google ученыйВада, Т.: Обнаружение целевого цвета на основе классификатора ближайшего соседа: классификация на основе примеров и ее приложения. Примечания JPJS SIG, 2002-CVIM-134, стр. 17–24 (2002)
Google ученый
Баррето, Дж. П., Араужо, Х.: Вопросы геометрии формирования центрального катадиоптрического изображения. ЦВПР (2001)
Google ученый
Фитцгиббон, А., Пилу, М., Фишер, Р.Б.: Прямая аппроксимация эллипсов методом наименьших квадратов.
 IEEE транс. по анализу закономерностей и машинному интеллекту 21(5), 476–480 (1999)
IEEE транс. по анализу закономерностей и машинному интеллекту 21(5), 476–480 (1999)Перекрестная ссылка
Google ученый
Халир, Р., Флюссер, Дж.: Численно устойчивая прямая подборка эллипсов методом наименьших квадратов. ВСКГ (1998)
Google ученый
Ссылки для скачивания
Информация об авторе
Авторы и организации
Факультет системной инженерии, Университет Вакаяма, город Вакаяма, Вакаяма, 640-8510, Япония
Qian Chen, Haiyuan Wu & Toshikazu Wada
Авторы
- Qian Chen
Просмотр публикаций автора
Вы также можете искать этого автора в
PubMed Google Scholar - Haiyuan Wu
Просмотр публикаций автора
Вы также можете искать этого автора в
PubMed Google Scholar - Toshikazu Wada
Просмотр публикаций автора
Вы также можете искать этого автора в
PubMed Google Академия
Информация для редакторов
Редакторы и филиалы
Центр машинного восприятия, кафедра кибернетики, Факультет электротехники, Чешский технический университет, Прага 6, Чехия
Томаш Пайдла
- 4 Центр машинного восприятия
- 4 , кафедра кибернетики, эл.

