Вальцовка это что: Вальцевание | это… Что такое Вальцевание?
Содержание
404 — страница не найдена
Ошибка 404 — страница не найдена
Ваш город Москва?
При выборе изменится адрес и контакты представительства в вашем городе, а также актуальный ассортимент товаров.
- Россия
- Казахстан
- Белоруссия
- Кыргызстан
- Узбекистан
- Таджикистан
Выберите ваш город
Россия
Россия
Казахстан
Белоруссия
Кыргызстан
Узбекистан
Таджикистан
А
АктауАктобеАлматыАтырауАшхабад
Д
Душанбе
Ж
Жезказган
К
КарагандаКокшетауКостанайКызылорда
Н
Нур-Султан (Астана)
П
ПавлодарПетропавловск
С
Семей
Т
ТалдыкорганТаразТуркестан
У
УральскУсть-Каменогорск
Ш
Шымкент
Б
Брест
В
Витебск
Г
ГомельГродно
М
МинскМогилёв
Б
БаткенБишкек
Д
Джалал-Абад
К
Каракол
Н
Нарын
О
Ош
Т
Талас
А
Андижан
Б
Бухара
Н
Нукус
С
Самарканд
Т
Ташкент
Ф
Фергана
Б
БохтарБустон
В
Вахдат
Г
ГиссарГулистон
Д
Душанбе
И
ИстаравшанИстиклолИсфара
К
КанибадамКулябКурган-Тюбе
Л
Левакант
Н
Нурек
П
Пенджикент
Р
Рогун
Т
Турсунзаде
Х
ХорогХуджанд
Обратный звонок
Введите имя
Введите номер телефона
Нажимая на кнопку, вы соглашаетесь на обработку персональных данных
Оформление заказа
Введите имя
Введите номер телефона
Нажимая на кнопку, вы соглашаетесь на обработку персональных данных
Запрос цены
Введите имя Введите номер телефона
Нажимая на кнопку, вы соглашаетесь на обработку персональных данных
Товар добавлен!
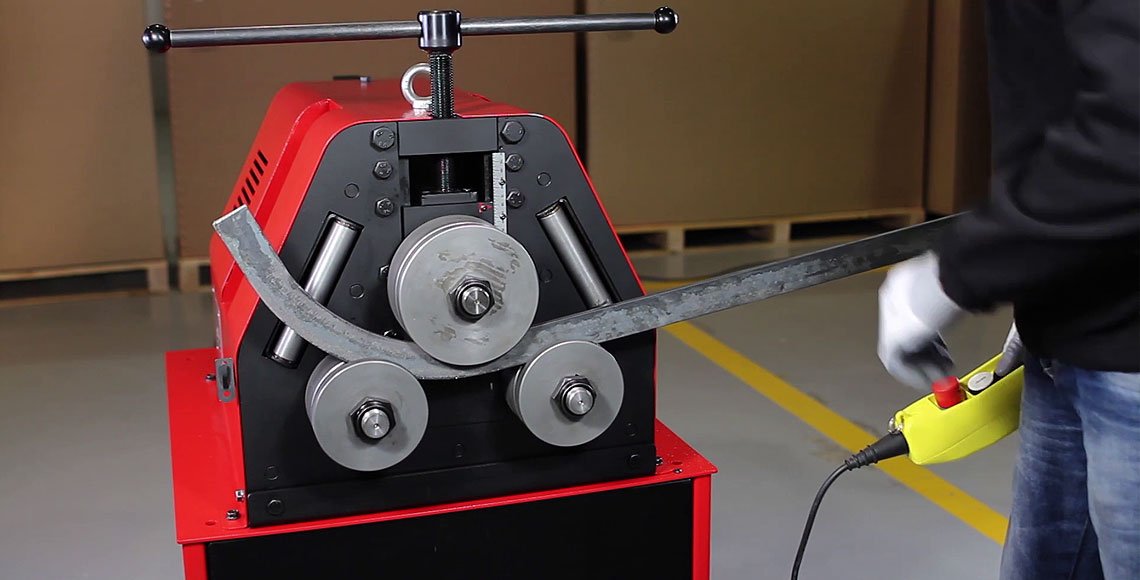
Вальцовка листового металла на заказ в Москве и Твери
Вальцовка листового металла на заказ
Вальцовка металла — это технологическая операция, в процессе которой происходит пластическая деформация металлических заготовок для формирования из них изделий требуемой конфигурации, цилиндрической, конической и овальной формы. Заказать услуги вальцовки листового металла в Твери и Москве можно на сайте или по телефону +7 (4822) 50-22-22
Заказать услуги вальцовки листового металла в Твери и Москве можно на сайте или по телефону +7 (4822) 50-22-22
Вальцовка выполняется на станках, оснащенных валками, отсюда и название технологии. Изменяя расстояние между соседними валками и прокатывая металл между ними, получают необходимые размер и форму конечного изделия или детали. При этом может производиться как обработка цилиндрических заготовок (труб) для придания им овальной, либо какой-то более сложной формы, так и вальцевание деталей из плоского листа.
Используемое оборудование
При производстве работ, мы используем трёхвалковый электромеханический станок SBX–V1300×2 с прецизионными валами из высокопрочной стали. Станок обеспечивает высокое качество и точность изготовления.
Технические характеристики
- рабочая длина заготовки — 1250 мм,
- максимальная толщина металла — 2 мм,
- минимальный диаметр прокатки — 200 мм
Преимущества технологии
Вальцовка металла очень щадящий процесс. В отличие от вытяжки и формовки методом прессования, изменение формы обрабатываемой заготовки происходит постепенно с небольшими удельными нагрузками. Деталям не требуется нагревание, они не подвергаются ударным нагрузкам. Как следствие, на металле не образуются зоны неравномерной деформации и внутренние напряжения. Толщина исходного металла остаётся неизменной.
В отличие от вытяжки и формовки методом прессования, изменение формы обрабатываемой заготовки происходит постепенно с небольшими удельными нагрузками. Деталям не требуется нагревание, они не подвергаются ударным нагрузкам. Как следствие, на металле не образуются зоны неравномерной деформации и внутренние напряжения. Толщина исходного металла остаётся неизменной.
Допускается использование листового металла с нанесёнными на заводе защитными полимерными покрытиями или оцинкованным. При обработке защитные покрытия не нарушаются. Это позволяет получать готовые изделия, минуя стадию нанесения защитных покрытий.
Также для вальцевания характерны очень низкие энергозатраты. Всё это позволяет уменьшить стоимость работ с сохранением высокого качества изделий в сравнении с другими способами обработки.
Сфера применения услуги
- изготовление различных емкостей, сепараторов, баков,
- улиток промышленных вентиляторов, воздуходувок
- хомутов для крепления труб
- элементов систем вентиляции, труб большого диаметра
- элементов водостоков
- кожухов теплоизоляции трубопроводов
- различных желобов.

Технология может быть использована для изготовления деталей из черных, цветных и оцинкованных металлов, а также металлов с нанесёнными полимерными покрытиями.
В отдельных случаях возможна обратная процедура — выпрямление заготовок.
При изготовлении сложных изделий, вальцевание может быть только одной из операций производственного цикла. В арсенале предприятия имеется широкий выбор способов обработки металла, включая лазерную резку, гибку, штамповку, сварку и окраску. Это позволяет производить изделия любой сложности и конфигурации, не ограничиваясь лишь вальцеванием.
Вальцовка металла по выгодной цене
Цена на процедуру вальцовки металла будет зависеть от объёма заказа, размеров и толщины заготовки, сложности формы изделия, и необходимости финишной отделки. Мы предлагаем услуги на вальцовку листового металла на выгодных для вас условиях.
Наш опыт, наличие квалифицированных работников и современный станочный парк является гарантией высокого качества выполнения работ и удовлетворения ваших потребностей по ассортименту и цене.
Заказать
Rolling — Гиперучебник по физике
[закрыть]
Качение без проскальзывания представляет собой комбинацию поступательного движения и вращения, при которой точка контакта мгновенно находится в состоянии покоя.
Когда объект испытывает чисто поступательное движение , все его точки движутся с той же скоростью, что и центр масс; то есть в том же направлении и с той же скоростью
| v ( r ) = | v центр масс |
Объект также будет двигаться по прямой линии в отсутствие результирующей внешней силы.
Когда объект совершает чистое вращательное движение вокруг своего центра масс, все его точки движутся под прямым углом к радиусу в плоскости, перпендикулярной оси вращения, со скоростью, пропорциональной расстоянию от оси вращения…
| v ( r ) = | рω |
Таким образом точки по разные стороны от оси движутся в противоположных направлениях, точки по оси вообще не двигаются, так как r = 0 там…
| v центр масс = | 0 |
и точки на внешнем ребре двигаются с максимальной скоростью…
| v внешний край = | Rω |
Когда объект испытывает катящееся движение , точка объекта, соприкасающаяся с поверхностью, мгновенно становится неподвижной…
| v точка контакта = | 0 |
и является мгновенной осью вращения. Таким образом, центр масс объекта движется со скоростью…
| v центр масс = | Rω |
и точка, удаленная от точки касания, движется с удвоенной скоростью
| v напротив точки контакта = | 2 v см = 2 Rω |
трискелион
Колесо является продолжением стопы.
рулетки
- циклоиды
- циклоида
- вытянутая циклоида
- циклоид куртате
- эпициклоиды
- эпициклоида
- кардиоидная
- нефроид
- ранункулоид
- гипоциклоиды
- гипоциклоида
- астроид
- дельтовидная
сопротивление качению
сопротивление качению
| интерфейс | коэффициент | |
|---|---|---|
| велосипедная шина на… | деревянная дорожка | 0,001 |
| гладкий бетон | 0,002 | |
| асфальтированная дорога | 0,004 | |
| неровная, но асфальтированная дорога | 0,008 | |
11.
 2: Катящееся движение — Физика LibreTexts
2: Катящееся движение — Физика LibreTexts
- Последнее обновление
- Сохранить как PDF
- Идентификатор страницы
- 4034
- OpenStax
- OpenStax
Цели обучения
- Описать физику качения без проскальзывания
- Объясните, как линейные переменные связаны с угловыми переменными для случая качения без проскальзывания
- Найти линейное и угловое ускорения при качении с проскальзыванием и без него
- Рассчитать силу трения покоя, связанную с качением без проскальзывания
- Использование энергосбережения для анализа качения
Вращательное движение — это обычное сочетание вращательного и поступательного движения, которое мы видим повсюду, каждый день. Подумайте о различных ситуациях, когда колеса движутся по шоссе, или колеса самолета приземляются на взлетно-посадочную полосу, или колеса робота-исследователя на другой планете. Понимание сил и крутящих моментов, возникающих при качении , является решающим фактором во многих различных ситуациях.
Подумайте о различных ситуациях, когда колеса движутся по шоссе, или колеса самолета приземляются на взлетно-посадочную полосу, или колеса робота-исследователя на другой планете. Понимание сил и крутящих моментов, возникающих при качении , является решающим фактором во многих различных ситуациях.
Для анализа качения в этой главе обратитесь к рисунку 10.5.4 в разделе «Вращение с фиксированной осью», чтобы найти моменты инерции некоторых общих геометрических объектов. Вы также можете найти его полезным в других расчетах, связанных с вращением.
Перекатывание без проскальзывания
Люди наблюдали перекатывание без проскальзывания с момента изобретения колеса. Например, мы можем посмотреть на взаимодействие шин автомобиля и поверхности дороги. Если водитель нажимает педаль акселератора в пол так, что шины крутятся, а автомобиль не движется вперед, между колесами и поверхностью дороги должно быть кинетическое трение. Если водитель медленно нажимает на педаль акселератора, заставляя автомобиль двигаться вперед, то шины катятся без проскальзывания. Для большинства людей удивительно, что на самом деле нижняя часть колеса находится в покое по отношению к земле, что указывает на наличие статического трения между шинами и поверхностью дороги. На рисунке \(\PageIndex{1}\) велосипед движется, а всадник остается в вертикальном положении. Шины соприкасаются с дорожным покрытием, и, несмотря на то, что они катятся, нижняя часть шин слегка деформируется, не скользит и находится в состоянии покоя относительно дорожного покрытия в течение измеримого промежутка времени. Для этого между шиной и поверхностью дороги должно быть статическое трение.
Для большинства людей удивительно, что на самом деле нижняя часть колеса находится в покое по отношению к земле, что указывает на наличие статического трения между шинами и поверхностью дороги. На рисунке \(\PageIndex{1}\) велосипед движется, а всадник остается в вертикальном положении. Шины соприкасаются с дорожным покрытием, и, несмотря на то, что они катятся, нижняя часть шин слегка деформируется, не скользит и находится в состоянии покоя относительно дорожного покрытия в течение измеримого промежутка времени. Для этого между шиной и поверхностью дороги должно быть статическое трение.
Рисунок \(\PageIndex{1}\): (a) Велосипед движется вперед, и его шины не скользят. Нижняя часть слегка деформированной шины находится в покое относительно поверхности дороги в течение измеримого периода времени. (b) На этом изображении видно, что верхняя часть катящегося колеса кажется размытой из-за его движения, но нижняя часть колеса мгновенно остается в покое. (кредит a: модификация работы Нельсона Лоуренсо; кредит b: модификация работы Колина Роуза)
Чтобы проанализировать качение без проскальзывания, мы сначала выводим линейные переменные скорости и ускорения центра масс колеса в терминах угловые переменные, описывающие движение колеса. Ситуация показана на рисунке \(\PageIndex{2}\).
Ситуация показана на рисунке \(\PageIndex{2}\).
Рисунок \(\PageIndex{2}\): (a) Колесо тянется по горизонтальной поверхности под действием силы \(\vec{F}\). Сила трения покоя \(\vec{f}_{s}\), \(|\vec{f}_{s}|\) ≤ \(\mu_{s}\)N достаточно велика, чтобы это от скольжения. (b) Векторы линейной скорости и ускорения центра масс и соответствующие выражения для \(\omega\) и \(\alpha\). Точка P покоится относительно поверхности. (c) Относительно системы центра масс (ЦМ) точка P имеет линейную скорость −R\(\omega \hat{i}\).
На рисунке \(\PageIndex{2}\)(a) мы видим векторы сил, участвующих в предотвращении проскальзывания колеса. В (b) точка P, которая касается поверхности, покоится относительно поверхности. Относительно центра масс точка P имеет скорость −R\(\omega\hat{i}\), где R – радиус колеса, а \(\omega\) – угловая скорость колеса относительно своей оси. Поскольку колесо катится, скорость P относительно поверхности равна его скорости относительно центра масс плюс скорость центра масс относительно поверхности:
\[\vec{v}_{P} = -R \omega \hat{i} + v_{CM} \hat{i} \ldotp\]
Так как скорость P относительно поверхности равна нулю , v P = 0, это говорит о том, что
\[v_{CM} = R \omega \ldotp \label{11. 1}\]
1}\]
Таким образом, скорость центра масс колеса равна его радиусу, умноженному на угловой скорость относительно своей оси. Покажем соответствие линейной переменной в левой части уравнения угловой переменной в правой части уравнения. Это сделано ниже для линейного ускорения.
Если продифференцировать уравнение \ref{11.1} в левой части уравнения, мы получим выражение для линейного ускорения центра масс. В правой части уравнения R является константой, и поскольку \(\alpha = \frac{d \omega}{dt}\), мы имеем
\[a_{CM} = R \alpha \ldotp \label {11.2}\]
Кроме того, мы можем найти расстояние, пройденное колесом, в терминах угловых переменных, обратившись к рисунку \(\PageIndex{3}\). Когда колесо катится из точки А в точку В, его внешняя поверхность совпадает с землей ровно на пройденное расстояние, равное d СМ .
Из рисунка \(\PageIndex{3}\) видно, что длина внешней поверхности, которая отображается на землю, равна длине дуги R\(\theta\). Приравнивая два расстояния, получаем
\[d_{CM} = R \theta \ldotp \label{11. 3}\]
3}\]
Рисунок \(\PageIndex{3}\): Когда колесо катится по поверхности, дуга длина R\(\theta\) от A до B отображается на поверхность, соответствующую расстоянию d CM , на которое переместился центр масс.
Пример \(\PageIndex{1}\): скатывание по наклонной плоскости
Сплошной цилиндр катится по наклонной плоскости без проскальзывания, начиная с состояния покоя. Он имеет массу m и радиус r. а) Чему равно его ускорение? б) Какому условию должен удовлетворять коэффициент трения покоя \(\mu_{S}\), чтобы цилиндр не скользил?
Стратегия
Нарисуйте эскиз и диаграмму свободного тела и выберите систему координат. Положим x в направлении вниз по плоскости, а y вверх перпендикулярно плоскости. Определить задействованные силы. Это нормальная сила, сила тяжести и сила трения. Запишите законы Ньютона в направлениях x и y и закон Ньютона для вращения, а затем определите ускорение и силу трения.
Решение
- Диаграмма свободного тела и эскиз показаны на рисунке \(\PageIndex{4}\), включая нормальную силу, компоненты веса и силу трения покоя.
 Трения едва хватает, чтобы цилиндр вращался без проскальзывания. Поскольку скольжения нет, величина силы трения меньше или равна \(\mu_{S}\)N. Записав законы Ньютона в направлениях x и y, мы получим
Трения едва хватает, чтобы цилиндр вращался без проскальзывания. Поскольку скольжения нет, величина силы трения меньше или равна \(\mu_{S}\)N. Записав законы Ньютона в направлениях x и y, мы получим
\[\sum F_{x} = ma_{x};\; \сумма F_{y} = ma_{y} \ldotp\]
Рисунок \(\PageIndex{4}\): Твердый цилиндр катится по наклонной плоскости, не соскальзывая с места. Система координат имеет x в направлении вниз по наклонной плоскости и y перпендикулярно плоскости. Диаграмма свободного тела показана с нормальной силой, силой трения покоя и компонентами веса m\(\vec{g}\). Трение заставляет цилиндр катиться по плоскости, а не скользить.
Подстановка из диаграммы свободного тела
\[\begin{split} mg \sin \theta — f_{s} & = m(a_{CM}) x, \\ N — mg \cos \theta & = 0 \end{split}\]
мы можем найти линейное ускорение центра масс из этих уравнений:
\[a_{CM} = g\sin \theta — \frac{f_s}{m} \ldotp\]
полезно выразить линейное ускорение через момент инерции. Для этого запишем второй закон Ньютона для вращения:
\[\sum \tau_{CM} = I_{CM} \alpha \ldotp\]
Моменты вычисляются относительно оси, проходящей через центр масс цилиндр. Единственный ненулевой крутящий момент обеспечивается силой трения. У нас есть
Единственный ненулевой крутящий момент обеспечивается силой трения. У нас есть
\[f_{s} r = I_{CM} \alpha \ldotp\]
Наконец, линейное ускорение связано с угловым ускорением соотношением
\[(a_{CM})_{x} = r \alpha \ldotp\]
Эти уравнения можно использовать для решения для CM , \(\alpha\) и f S с точки зрения момента инерции, где мы опустили индекс x. Запишем CM через вертикальную составляющую силы тяжести и силы трения и сделаем следующие замены.
9{2}}\right)} = \frac{1}{3} \tan \theta \ldotp$$
Значение
- Линейное ускорение линейно пропорционально греху \(\тета\). Таким образом, чем больше угол наклона, тем больше линейное ускорение, как и следовало ожидать. Однако угловое ускорение линейно пропорционально sin \(\theta\) и обратно пропорционально радиусу цилиндра. Таким образом, чем больше радиус, тем меньше угловое ускорение.
- Чтобы не происходило скольжения, коэффициент трения покоя должен быть больше или равен \(\frac{1}{3}\)tan \(\theta\).
 Таким образом, чем больше угол наклона, тем больше должен быть коэффициент трения покоя, чтобы цилиндр не проскальзывал.
Таким образом, чем больше угол наклона, тем больше должен быть коэффициент трения покоя, чтобы цилиндр не проскальзывал.
Упражнение \(\PageIndex{2}\)
Полый цилиндр находится под наклоном под углом 60°. Коэффициент трения покоя о поверхность \(\mu_{s}\) = 0,6. а) Катится ли цилиндр без проскальзывания? б) Будет ли сплошной цилиндр катиться без проскальзывания? 9{2}}\right)} \ldotp \label{11.4}\]
Это очень полезное уравнение для решения задач, связанных с качением без проскальзывания. Обратите внимание, что ускорение меньше, чем у объекта, скользящего по плоскости без трения без вращения. Ускорение также будет разным для двух вращающихся цилиндров с разной инерцией вращения.
Качение с проскальзыванием
В случае качения с проскальзыванием мы должны использовать коэффициент кинетического трения, который приводит к кинетической силе трения, поскольку статического трения нет. Ситуация показана на рисунке \(\PageIndex{5}\). В случае проскальзывания v CM − R\(\omega\) ≠ 0, так как точка P на колесе не покоится на поверхности, и v P ≠ 0. Таким образом, \(\omega\) ≠ \(\frac{ v_{CM}}{R}\), \(\alpha \neq \frac{a_{CM}}{R}\).
Таким образом, \(\omega\) ≠ \(\frac{ v_{CM}}{R}\), \(\alpha \neq \frac{a_{CM}}{R}\).
Рисунок \(\PageIndex{5}\): (a) Между колесом и поверхностью возникает кинетическое трение, потому что колесо проскальзывает. (b) Простые отношения между линейными и угловыми переменными больше не действуют.
Пример \(\PageIndex{2}\): скатывание по наклонной плоскости с проскальзыванием
Твердый цилиндр скатывается с наклонной плоскости из состояния покоя и испытывает проскальзывание (рис. \(\PageIndex{6}\)). Он имеет массу m и радиус r. а) Чему равно его линейное ускорение? б) Чему равно его угловое ускорение относительно оси, проходящей через центр масс?
Стратегия
Нарисуйте эскиз и диаграмму свободного тела, показывающую действующие силы. Диаграмма свободного тела аналогична случаю отсутствия проскальзывания, за исключением того, что сила трения является кинетической, а не статической. Используйте второй закон Ньютона, чтобы найти ускорение в направлении x. Используйте второй закон вращения Ньютона, чтобы найти угловое ускорение.
Используйте второй закон вращения Ньютона, чтобы найти угловое ускорение.
Решение
Рис. \(\PageIndex{6}\): Твердый цилиндр скатывается из состояния покоя по наклонной плоскости и скользит. Система координат имеет x в направлении вниз по наклонной плоскости и y вверх перпендикулярно плоскости. Диаграмма свободного тела показывает нормальную силу, кинетическую силу трения и компоненты веса m\(\vec{g}\).
Сумма сил в направлении y равна нулю, поэтому сила трения теперь равна f k = \(\mu_{k}\)N = \(\mu_{k}\)mg cos \(\ тета\). Второй закон Ньютона в направлении x принимает вид
\[\sum F_{x} = ma_{x}, \nonumber\]
\[mg \sin \theta — \mu_{k} mg \cos \theta = m(a_{CM})_{x}, \nonumber\]
или
\[(a_{CM})_{x} = g(\sin \theta — \mu_{k} \cos \theta ) \ldotp \nonumber\]
Сила трения обеспечивает единственный крутящий момент относительно оси, проходящей через центр масс, поэтому второй закон вращения Ньютона принимает вид 9{2} \alpha \ldotp \nonumber\]
Решая для \(\alpha\), получаем
\[\alpha = \frac{2f_{k}}{mr} = \frac{2 \mu_{ k} g \cos \theta}{r} \ldotp \nonumber\]
Значение
Линейное и угловое ускорения запишем через коэффициент кинетического трения. Линейное ускорение такое же, как у тела, скользящего по наклонной плоскости с кинетическим трением. Угловое ускорение относительно оси вращения линейно пропорционально нормальной силе, зависящей от косинуса угла наклона. Как \(\тета\) → 9{2} + mgh \ldotp\]
Линейное ускорение такое же, как у тела, скользящего по наклонной плоскости с кинетическим трением. Угловое ускорение относительно оси вращения линейно пропорционально нормальной силе, зависящей от косинуса угла наклона. Как \(\тета\) → 9{2} + mgh \ldotp\]
При отсутствии каких-либо неконсервативных сил, отнимающих энергию из системы в виде тепла, полная энергия катящегося тела без проскальзывания сохраняется и постоянна на протяжении всего движения. Примерами, когда энергия не сохраняется, являются катящийся объект, который скользит, выделение тепла в результате кинетического трения и катящийся объект, встречающий сопротивление воздуха.
Вы можете спросить, почему катящийся объект, который не скользит, сохраняет энергию, ведь сила трения покоя не является консервативной. Ответ можно найти, вернувшись к рисунку \(\PageIndex{2}\). Точка P, соприкасающаяся с поверхностью, покоится относительно поверхности. Следовательно, его бесконечно малое перемещение d\(\vec{r}\) относительно поверхности равно нулю, и равна нулю дополнительная работа силы трения покоя. Мы можем применить закон сохранения энергии к нашему изучению качения, чтобы получить некоторые интересные результаты.
Мы можем применить закон сохранения энергии к нашему изучению качения, чтобы получить некоторые интересные результаты.
Пример \(\PageIndex{3}\): Марсоход Curiosity
Марсоход Curiosity , показанный на рисунке \(\PageIndex{7}\), был отправлен на Марс 6 августа 2012 года. Ровер имеет радиус 25 см. Предположим, астронавты прибывают на Марс в 2050 году и обнаруживают ныне неработающий Curiosity на краю бассейна. Пока разбирают марсоход, космонавт случайно теряет сцепление с одним из колес, которое катится, не соскальзывая, на дно котловины на 25 метров ниже. Если колесо имеет массу 5 кг, какова его скорость на дне чаши?
Рисунок \(\PageIndex{7}\): Марсоход Curiosity из научной лаборатории НАСА во время испытаний 3 июня 2011 года. Место находится внутри цеха сборки космических кораблей в Лаборатории реактивного движения НАСА в Пасадене, Калифорния. (кредит: NASA/JPL-Caltech)
Стратегия
Мы используем сохранение механической энергии для анализа проблемы. На вершине холма колесо покоится и обладает только потенциальной энергией. На дне бассейна колесо имеет вращательную и поступательную кинетическую энергию, которая должна быть равна начальной потенциальной энергии по закону сохранения энергии. Поскольку колесо катится без проскальзывания, воспользуемся соотношением v 9{2})(25,0\; м)} = 9,63\; м/с \ldotp \nonumber\]
На вершине холма колесо покоится и обладает только потенциальной энергией. На дне бассейна колесо имеет вращательную и поступательную кинетическую энергию, которая должна быть равна начальной потенциальной энергии по закону сохранения энергии. Поскольку колесо катится без проскальзывания, воспользуемся соотношением v 9{2})(25,0\; м)} = 9,63\; м/с \ldotp \nonumber\]
Значимость
Это довольно точный результат, учитывая, что на Марсе очень мало атмосферы, и потери энергии из-за сопротивления воздуха минимальны. Результат также предполагает, что местность гладкая, так что колесо не будет натыкаться на камни и неровности на своем пути.
Кроме того, в этом примере кинетическая энергия или энергия движения поровну распределяется между линейным и вращательным движением. Если мы посмотрим на моменты инерции на рис. 10.5.4, то увидим, что полый цилиндр имеет наибольший момент инерции для данного радиуса и массы. Если бы колеса вездехода были твердыми и аппроксимировались твердыми цилиндрами, например, кинетическая энергия была бы больше при прямолинейном движении, чем при вращательном.
