А i арматура: Арматура А1 (А240) характеристики, свойства – купить арматуру А1 (А240) оптом в СПб (Санкт-Петербург) с доставкой по России в компании ЛенСпецСталь
Содержание
Таблица расчета веса арматуры А1 – Первая Металлобаза
Вы находитесь в разделе Справочной информации.
Если вам нужно узнать цену и рассчитать точный вес предполагаемого заказа, перейдите по ссылке в соответствующий раздел: Арматура гладкая А1.
Основные параметры и размеры гладкого арматурного проката
Арматурная сталь с гладким профилем класса А-I (А240) выпускается с сечением в диапазоне от 6 до 40 мм. Сортамент производится из конструкционной углеродистой стали обыкновенного качества марок Ст3пс, Ст3кп или Ст3сп.
Арматура гладкая ГОСТ 5781-82 класса А240 легко сваривается, что позволяет применять различные технологии сварки. Уровень механической прочности арматурных элементов гладкого профиля из Ст3 равен 373 МПа.
Таблица основных характеристик гладкого арматурного проката | |||
Чертеж | Диаметр, мм | Масса, кг | Норматив |
от 6 до 80 | от 0,222 до 39,460 | ГОСТ 5781-82 | |
Применение. Такие характеристики делают сортамент востребованным в различных отраслях промышленности для производства малонагруженных деталей сварных и несварных конструкций и деталей, эксплуатируемых при температурном режиме — 40 до 400 ⁰С, а также для несущих блоков, используемых при плюсовых значениях температуры.
Такие характеристики делают сортамент востребованным в различных отраслях промышленности для производства малонагруженных деталей сварных и несварных конструкций и деталей, эксплуатируемых при температурном режиме — 40 до 400 ⁰С, а также для несущих блоков, используемых при плюсовых значениях температуры.
Стержни применяют для армирования бетонированных площадок, кирпичной кладки, для повышения прочности стяжек пола. Кроме этого, арматурная сталь применяется для производства метизов и штамповок. Также сортамент применяется в станкостроении для выпуска агрегатов, работающих даже в сложных условиях.
Размеры. Прутковые арматурные блоки производятся длиной 6 – 12 м, которая относится к категории:
- мерной;
- мерной с немерными отрезками до 2 м, количество которых не превышает 15% от веса партии;
- немерной.
Также производятся арматурные стержни длиной 5 — 25 метров по согласованию с заказчиком. Металлоизделия, диаметр которых не превышает 12 мм, поставляются в мотках или стержнях. Арматура большего сечения – в стержнях.
Арматура большего сечения – в стержнях.
Вес арматуры А1
Масса гладкопрофильной арматуры класса А240 зависит от диаметра. Номинальные параметры веса арматуры А1 для одного метра варьируются от 0,222 до 9,87 кг. Диапазон отклонений в зависимости от диаметра составляет от +9 до — 6%.
Таблица веса гладкой арматуры | |||
Диаметр, мм | Площадь поперечного сечения, мм | Вес погонного метра, кг | Метров в тонне |
6 | 28,27 | 0,222 | 4505,4 |
8 | 50,27 | 0,395 | 2534,3 |
10 | 78,54 | 0,617 | 1622 |
12 | 113,1 | 0,888 | 1126,4 |
14 | 153,94 | 1,208 | 827,5 |
16 | 201,06 | 1,578 | 633,6 |
18 | 254,47 | 1,998 | 500,6 |
20 | 314,16 | 2,466 | 405,5 |
22 | 380,13 | 2,984 | 335,1 |
24 | 452,39 | 3,551 | 281,6 |
25 | 490,87 | 3,853 | 259,5 |
26 | 530,93 | 4,168 | 239,9 |
28 | 615,75 | 4,834 | 206,9 |
30 | 706,89 | 5,549 | 180,2 |
32 | 804,25 | 6,313 | 158,4 |
34 | 907,92 | 7,127 | 140,3 |
36 | 1017,88 | 7,99 | 125,2 |
38 | 1134,11 | 8,903 | 112,3 |
40 | 1256,64 | 9,865 | 101,4 |
Общая масса партии металлопроката согласно нормативам равна 70 т.
Арматура гладкая: ГОСТ
Основным документом, регламентирующим технические характеристики гладкой арматуры, является ГОСТ 5781-82. Согласно ему, арматура А1 производится по технологии горячей прокатки. Горячекатаная арматурная сталь выдерживает повышенные статические постоянные и периодические нагрузки, поэтому в зависимости от марки сплава она применяется для малонагруженных, ненесущих и несущих конструкций. Показатели предела текучести для 1 класса стержневой арматуры равны 235 Н/мм². Значение временного сопротивления составляет 373 Н/мм². Согласно нормативам, относительное удлинение соответствует 25 % от исходных характеристик.
Технические характеристики арматуры класса А1 соответствуют строительным нормативам Благодаря этому металлоизделия используются для монтажа каркасов и опорных конструкций, на которые распространяются повышенные требования к несущей способности. В 2019 году вступил в действие ГОСТ 34028-2016, он распространяется на арматуру гладкого и периодического профиля. Он появился взамен ГОСТ 10884-94. Стандарт регулирует технические требования к арматуре: химический состав стали, качество поверхности изделия, механические свойства.
Он появился взамен ГОСТ 10884-94. Стандарт регулирует технические требования к арматуре: химический состав стали, качество поверхности изделия, механические свойства.
Виды арматуры и ее применение
Арматура играет важную роль в обеспечении строительства и имеет широкую область применения в разных отраслях промышленности. В частности, в составе железобетонных конструкций рифленая арматура диаметром 10-12 мм и других сечений предусмотрена для упрочнения бетона. Помимо прочего, она может использоваться при строительстве трубопроводов или выполнении сантехнических работ.
Согласно нормативным документам данный вид продукции называется «Сталь горячекатаная для армирования железобетонных конструкций» и производится согласно следующим стандартам:
- ГОСТ 5781-82 Сталь для армирования железобетонных конструкций
- ГОСТ 10884-94 Сталь арматурная термомеханически упроченная для железобетонных конструкций
- ГОСТ 6727-80 Проволока для армирования железобетонных конструкций
- СТО АСЧМ 7-93 Термомеханически упроченная арматурная сталь классов А400С и А500С
В соответствии с ГОСТ 5781 арматуру можно разделить на несколько классов в зависимости от ее механических свойств. Класс обозначается буквенным значением, напр. А — горячекатаная и термомеханически упрочненная арматура, и латинской цифрой от I до VI, которые определяют основной показатель качества — прочность арматуры на растяжение или предел текучести. Данные показатели устанавливаются государственными стандартами в пределах от 240 до 1000 Н/мм².
Класс обозначается буквенным значением, напр. А — горячекатаная и термомеханически упрочненная арматура, и латинской цифрой от I до VI, которые определяют основной показатель качества — прочность арматуры на растяжение или предел текучести. Данные показатели устанавливаются государственными стандартами в пределах от 240 до 1000 Н/мм².
- А-I (А240)
- А-II (А300)
- А-III (А400)
- А-IV (А600)
- А-V (А800)
- А-VI (А1000)
Арматурная сталь А-I — гладкая — то есть имеет гладкую поверхность, не имеющую рифления, в отличие от остальных классов, где арматурная сталь периодического профиля представляет собой круглые профили с двумя продольными ребрами и поперечными выступами. Пример рифленой арматуры приведен на рисунке:
Какая марка стали у арматуры?
Классу арматуры и диаметру ее профиля соответствуют углеродистые и низкоуглеродистые марки стали:
| класс арматуры | диаметр профиля, мм | марка стали |
| A-I | 6-40 | Cт3кп, Ст3пс, Ст3сп |
| A-II | 10-40 | Ст5сп, Ст5пс |
| 40-80 | 18Г2С | |
| Ac-II | 10-32 | 10ГТ |
| A-III | 6-40 | 35ГС, 25Г2С |
| 6-22 | 32Г2Зпс | |
| A-IV | 10-18 | 80С |
| 10-32 | 20ХГ2Ц | |
| A-IV | 10-32 | 23Х2Г2Т |
| A-VI | 10-22 | 22Х2Г2АЮ, 22Х2Г2Р, 20Х2Г2СР |
Отличия А3 и А500С
Как мы видим в таблице, арматура А3 изготавливается из марок стали 25Г2С и 35ГС, которые являются ограниченно свариваемыми. Это и определяет их основное отличие. Для А3 не рекомендуется использовать метод дуговой сварки, в то время как для А500С таких ограничений нет. Кстати, литера С в обозначении класса означает как раз то, что данный класс арматуры можно использовать для сваривания. Это обусловлено составом стали, который делает ее более пластичной. К примеру, а500с можно сгибать практически до угла в 90 градусов.
Это и определяет их основное отличие. Для А3 не рекомендуется использовать метод дуговой сварки, в то время как для А500С таких ограничений нет. Кстати, литера С в обозначении класса означает как раз то, что данный класс арматуры можно использовать для сваривания. Это обусловлено составом стали, который делает ее более пластичной. К примеру, а500с можно сгибать практически до угла в 90 градусов.
Другими отличиями этих классов являются:
— Разный рисунок рифления поверхности. У А3 два продольных ребра пересекаются с поперечными выступами, у а500с — не пересекаются.
— Предел текучести а500с на 20% выше чем у а3.
| Нормативные документы, механические свойства, области применения, эффективность | Класс арматуры | ||
| А400 (А-III) | А500С | ||
| Марка стали | |||
| 35ГС | 25Г2С | — | |
| Нормативные документы для поставки | ГОСТ 5781-82 | СТО АСЧМ 7-93 | |
| Нормативные документы для расчета и проектирования ж/б конструкций | СНиП 2. 03.01-84 03.01-84 | «Рекомендации» НИИЖБ ТСН 102-00 | |
| Временное сопротивление разрыву σВ, Н/мм² | 590 | 590 | 600 |
| Предел текучести σТ (σ0.2), Н/мм² | 390 | 390 | 500 |
| Относительное удлинение δ5, % | 14 | 14 | 14 |
| Угол изгиба при диаметре оправки C=3d | 90° | 90° | 180° |
| Расчетное сопротивление растяжению при Ø6,8 мм RS, Н/мм² | 355 | 355 | 450 |
| Расчетное сопротивление растяжению при Ø10-40 мм RS, Н/мм² | 365 | 365 | 450 |
| Расчетное сопротивление сжатию RSC, Н/мм | — | — | 450 |
| Расчетное сопротивление RSC, Н/мм | 390 | 390 | 500 |
| Применение при отрицательных температурах | до -40°C | до -55°C | до -55°C |
| Применение дуговой сварки прихватками крестообразных соединений | Запрещено | Не рекомендуется | Допускается |
| Применение в качестве анкеров закладных деталей | Допускается | Рекомендуется для повышенной надежности | |
| Применение в качестве монтажных петель | Запрещено | Возможно | |
| Возможный экономический эффект относительно арматуры класса А400 (А-III) | — | — | 10-25% |
Маркировка и обозначения
Тут все просто. Арматура обычно обозначается маркировкой, содержащей диаметр или номер профиля, класс прочности и стандарт, по которому она изготовлена. Например:
Арматура обычно обозначается маркировкой, содержащей диаметр или номер профиля, класс прочности и стандарт, по которому она изготовлена. Например:
- арматурная сталь диаметром 10 мм, класса прочности А240 (A-I): 10 А240 ГОСТ 5781-82;
- арматурная сталь диаметром 12 мм, класса прочности А400 (A-III): 12 А400 ГОСТ 5781-82;
- арматурная сталь диаметром 12 мм, класса прочности А500, свариваемой (С): 12 А500С СТО АСЧМ 7-93
Основные производители
Крупнейшими производителями и поставщиками арматуры в России и странах СНГ являются: ЗСМК, Белорусский МЗ, Криворожсталь, Северсталь, Чусовский МЗ.
В данном обзоре мы рассмотрели особенности и виды основных классов арматуры. Теперь вы знаете их основные отличия и без труда выберете оптимальное для себя решение, какую и где в Санкт-Петербурге купить арматуру. А если затрудняетесь с выбором, обращайтесь к нашим специалистам, Вы получите лучшее предложение с учетом ваших потребностей и возможностей.
Арматура А500С: технические характеристики и отличия от арматуры A-III
Одним из наиболее востребованных сегодня видов арматуры является А500С. Материал представляет собой стержень марки А5 диаметром от 6 до 40 мм. Данный вид проката производится в соответствии с требованиями ГОСТ 52544 2006. Материал относится к конструкционным элементам, которые в процессе прокатки подвергаются термомеханической обработке.
Арматура А500С считается универсальной благодаря ее отличным эксплуатационным характеристикам. Низкое содержание углерода в стали и ее термомеханическая обработка в процессе производства проката обеспечивают пластичность и улучшенную свариваемость конечного продукта. Также материал отличается повышенной долговечностью и вязкостью. По своим свойствам арматура этого класса соответствует требованиям стандартов международного уровня. Госстрой России рекомендует использование в железобетонных конструкциях марки А500С вместо и наряду с арматурой Ат-IIIС (ГОСТ 10884-81) и A-III марок 35ГС и 25Г2С (ГОСТ 5781-82) того же диаметра.
Расшифровка маркировки
Буква А в маркировке говорит о том, что этот вид материала относится к горячекатаному прокату, является термически и механически усиленным. Буква С указывает на возможность использования сварки для соединения элементов. Число 500 в маркировке является обозначением предела текучести материала.
Форма поставки
Прокат класса А500С поставляется в двух формах: в виде мотков или прутков. Если диаметр сечения составляет до 6 мм, материал формуется в мотки, от 6 до 12 мм поставляется в мотках или прутках по желанию клиента. Если диаметр больше 12 мм, прокат реализуется только в форме прутков.
Производство
Арматура этого класса производится под контролем ГОСТ Р 52544-2006 и СТО-АСЧМ 7-93. В качестве материала изготовления используется низкоуглеродистая сталь марок 35Г2С и 35ГС. Содержание углерода составляет не более 0,22 %. Для производства А500С применяются два метода: холоднотянутый и горячекатаный. В первом случае создается проволочная и катаная арматура, во втором – стержневая. Следует отметить, что прокат второго вида отличается более высокой прочностью. В сырье для А500С содержится меньше легирующих компонентов, чем у аналогов, что обеспечивает более выгодную стоимость конечного продукта.
Следует отметить, что прокат второго вида отличается более высокой прочностью. В сырье для А500С содержится меньше легирующих компонентов, чем у аналогов, что обеспечивает более выгодную стоимость конечного продукта.
Применение
Арматура А500С широко используется в сфере строительства при создании железобетонных конструкций, заливке фундамента и др. Материал применяется для армирования или усиления несущих конструкций (в соответствии с ГОСТ 10884-94) или простейших железобетонных конструкций (в соответствии с ГОСТ 5781-81).
Преимущества
А500С имеет множество преимуществ, мы перечислим основные из них:
- увеличенное расчетное сопротивление нагрузкам, что обеспечивает количественное сокращение расхода арматуры на создание конструкций;
- экономичность благодаря низкой стоимости термомеханической обработки материала;
- повышенная прочность и пластичность за счет отсутствия подкалки в зоне сварки;
- унификация – то есть возможность замены арматурой классов А240, А300 и А400.

Отличие А500С от A-III
Вид арматуры, который будет использоваться при возведении нового здания, выбирается на этапе разработки проекта. Для жилых зданий массой до 80 тонн используется преимущественно прокат А3. В эту категорию входит арматура А400 и А500С. Нередко эти классы считают одинаковыми или очень похожими, однако они имеют значительные различия:
- Сфера применения. Оба класса применяются для ремонта и отделки, строительства, производства ЖБИ, создания каркасов и прочее. Различие между А500С и А3 (А400) в том, что первый класс может использоваться как в нагруженных, так и в ненагруженных конструкциях, а второй – на участках повышенного напряжения.
- Внешний вид. Прокат класса А500С имеет профиль с серповидными выступами, которые не пересекаются с продольными ребрами. Такая форма обеспечивает более высокие пластические и прочностные характеристики. Также благодаря профилю материал не имеет концентраторов напряжений в местах пересечений продольных ребер с поперечными.
 Разные производители предлагают различные варианты этого материала, которые могут отличаться углом наклона серповидных элементов по отношению друг к другу и расстоянием между ними.
Разные производители предлагают различные варианты этого материала, которые могут отличаться углом наклона серповидных элементов по отношению друг к другу и расстоянием между ними. - Возможность сварки. Арматура А3, произведенная горячекатаным методом из стали марки 25ГС высокоуглеродистого типа, соответствует ГОСТ 5781-82. Индекс текучести изделия составляет 400 Н/мм2, что прописано в маркировке А400. Такой материал не подлежит сварке. Для соединения отдельных элементов может использоваться только вязальная проволока (в качестве скрепов на швах).
Все основные характеристики, по которым можно сравнить эти два класса металлопроката, мы собрали в таблице, приведенной ниже:
Прокат класса А400 (А-III) может заменяться на А500С без проведения повторных расчетов проекта. Обратная замена допустима только в случае дополнительных пересчетов. Это обеспечивает существенное повышение прочности и надежности конструкции, а также увеличивает срок ее службы. Выбирая прокат класса А500С, Вы сможете уменьшить количество необходимого материала в среднем на 10 %. Сокращение объема рабочего армирования позволяет снизить итоговую стоимость проекта.
Выбирая прокат класса А500С, Вы сможете уменьшить количество необходимого материала в среднем на 10 %. Сокращение объема рабочего армирования позволяет снизить итоговую стоимость проекта.
Поделиться:
Домашняя страница — Armature Systems
Адаптируемый. Масштабируемость. Надежный .
просмотреть тематические исследования
Мы БЕЗОПАСНО соединяем компании с их людьми и данными, используя наш опыт в области безопасности, автоматизации и сетей.
Быть способным.
Как мы можем сделать вас более способным?
Мы предоставляем нашим клиентам ВОЗМОЖНОСТИ путем оптимизации, подключения и защиты ваших данных. Мы работаем ЭКСПЕРТЫ , ориентированные только на услуги с наибольшей добавленной стоимостью. Мы помогаем раскрыть весь потенциал безопасности и сетевого стека наших клиентов, чтобы сделать их работу БЫСТРЕЕ, ПРОЩЕ, и БОЛЕЕ БЕЗОПАСНЫМ.
БЕЗОПАСНОСТЬ
Защитите свой бизнес, пользователей и данные
Расширенный доступ к технологиям дает больше свободы и гибкости, но вместе с этим возникают повышенные риски безопасности для вашего бизнеса. Мы специально решаем ваши самые большие риски безопасности, предоставляя комплексные решения для сетевой безопасности, безопасности конечных точек и безопасности в облаке.
АВТОМАТИЗАЦИЯ
Улучшение подотчетности, масштабирование операций, экономия денег
Мы создаем облачную инфраструктуру автоматизации, предназначенную для быстрого и надежного масштабирования ваших оперативных групп. Они легко отслеживают инциденты и автоматизируют ключевые задачи. Это сэкономит ваше время и деньги, а также освободит ваши оперативные группы, чтобы они могли сосредоточиться на том, что действительно важно.
СЕТЬ
Быстрое, беспрепятственное, надежное подключение ко всем вашим данным
Мы избегаем стандартных шаблонов дизайна от поставщиков. Вместо этого мы тратим время на то, чтобы понять ваши уникальные бизнес-потребности, а затем разработаем для вас сетевое решение, чтобы сделать развертывание или миграцию вашего кампуса или центра обработки данных полностью бесшовным.
Вместо этого мы тратим время на то, чтобы понять ваши уникальные бизнес-потребности, а затем разработаем для вас сетевое решение, чтобы сделать развертывание или миграцию вашего кампуса или центра обработки данных полностью бесшовным.
УПРАВЛЯЕМЫЕ УСЛУГИ
Управляемое техническое обслуживание, мониторинг и реагирование в процессе развития вашего бизнеса
Наши управляемые услуги являются результатом многолетнего сотрудничества с командами по сетям, безопасности и эксплуатации в сотнях организаций. Наши управляемые услуги были тщательно разработаны, чтобы быть эффективными, оптимизированными и полностью интегрированными с вашими командами и стеком безопасности, чтобы обеспечить вам душевное спокойствие.
Специальная команда для вашего проекта
Мы — сплоченная команда экспертов с многолетним межфункциональным опытом. Мы гибкие – мы проворны и выполняем сложные проекты с точностью. Мы тесно сотрудничаем с вами, чтобы сделать ПРАВИЛЬНЫМ. Наша команда инженеров определяет ваши уникальные проблемы безопасности, создает четкую стратегию, проверяет гипотезы на различных продуктах, а затем создает ВАШЕ индивидуальное решение.
Наша команда инженеров определяет ваши уникальные проблемы безопасности, создает четкую стратегию, проверяет гипотезы на различных продуктах, а затем создает ВАШЕ индивидуальное решение.
Чем мы занимаемся
Объединяя наш многолетний межфункциональный опыт в области безопасности, автоматизации, сетей и беспроводной связи. Мы поставляем безопасные, надежные, быстрые и масштабируемые сети.
Практический пример автоматизации
Модернизация центра обработки данных Flex, чтобы он стал полностью МАСШТАБИРУЕМЫМ для дальнейшего роста.
Просмотреть исследование
Экспертиза
Мы команда инженеров и специалистов в данной области ЭКСПЕРТОВ . Мы не делаем все. Мы фокусируемся на том, что важнее всего для безопасного соединения компаний с их людьми и данными. Посмотрите наши видео и кейсы.
Мы не делаем все. Мы фокусируемся на том, что важнее всего для безопасного соединения компаний с их людьми и данными. Посмотрите наши видео и кейсы.
Представляем Juniper Mist Wired, основанный на Mist AI. Это новая облачная служба, которая может предоставлять телеметрию и настраиваемые уровни обслуживания для обеспечения бесперебойной работы вашей сети.
Продолжить чтение Mist Wired Assurance
Чтобы поддерживать продуктивную и безопасную рабочую силу, компаниям необходимо предоставить своим сотрудникам возможность работать в любом месте в любое время с любого устройства. Чтобы безопасно развернуть это, крупные предприятия обратились к модели безопасности с нулевым доверием, которая динамически предоставляет доступ каждому пользователю в зависимости от того, кто он, с какого устройства входит в систему и где находится.
Продолжить чтение Начало работы с Zero Trust с помощью Okta
Endpoint Пример защиты
Повышение эффективности CAPABLE за счет улучшенной защиты конечных точек.
ПОСМОТРЕТЬ ИССЛЕДОВАНИЕ
Истории успеха
Успешное развертывание для бывших клиентов.
Компания Armature помогла нам безукоризненно перейти с устаревшей инфраструктуры брандмауэров центра обработки данных на новые брандмауэры Palo Alto Networks. Они очень хорошо разбираются в брандмауэрах — я бы порекомендовал их для развертывания любого кампуса или центра обработки данных.
Ван Нгуен,
Директор по глобальной информационной безопасности в Brinks
С Armature это явно больше связано с отношениями. Для них речь идет не только о продвижении продуктов и не только о продвижении профессиональных услуг. Вместо этого они предлагают то, что вам действительно нужно, и поддерживают вас наилучшим образом.
Джимми С.
Начальник службы безопасности Netflix
Моя команда работала с Armature над рядом проектов, связанных с безопасностью и сетевой инфраструктурой, и что отличает их от любого другого поставщика, так это не только их уровень знаний, но тот факт, что они действуют как доверенные консультанты, а не просто пытаются продать нам продукты.
Юсуф Хан
ИТ-директор Moveworks
Свяжитесь с нами, чтобы начать работу
Свяжитесь с нашей командой инженеров.
Armature Systems Office
1980 Zanker Road, Suite № 30
San Jose, CA 95112
Телефон: 408.606.8227
Принеси нам свой вызов
. Роботы в расширенной реальности
1 Введение
Мягкие роботы обычно предназначены для работы в крайне непредсказуемых и неструктурированных средах. Хотя их мягкие тела помогают им пассивно приспосабливаться к окружающей среде, выполнение определенных задач в таких средах часто требует помощи оператора, который наблюдает за взаимодействием между мягким роботом и его средой и регулирует входные сигналы для успешного выполнения задания. задача. Однако прямое наблюдение за мягким роботом невозможно, когда робот работает под землей (Calderón et al., 2016), под водой (van den Berg et al., 2020), in vivo (Runciman et al. , 2019) или в замкнутых пространствах (Takayama et al., 2015; Mazzolai et al., 2019). В таких сценариях оператор должен полагаться на моделирование конфигурации мягкого робота в реальном времени на основе сигналов проприоцептивных датчиков. Хотя для мягких роботов было разработано несколько методов проприоцептивного восприятия и калибровки (Scharff et al., 2018; Van Meerbeek et al., 2018), прогнозирование сложных трехмерных (3D) конфигураций на основе данных этого датчика может быть затруднено. интерпретировать с использованием традиционных методов визуализации. В конечном итоге это приводит к сбоям в выполнении задач или неэффективному выполнению задач. Трехмерное моделирование мягкого робота в реальном времени на иммерсивном дисплее [т. е. расширенная реальность (XR)] значительно поможет оператору в удаленном управлении роботом. Помимо предоставления интуитивно понятного способа наблюдения за конфигурацией мягкого робота в трехмерном пространстве, XR позволяет отображать дополнительную информацию (например, расположение и величину внешних сил, действующих на робота, извлекаемую из дополнительных встроенных датчиков), относящуюся к моделируемому мягкому приводу.
, 2019) или в замкнутых пространствах (Takayama et al., 2015; Mazzolai et al., 2019). В таких сценариях оператор должен полагаться на моделирование конфигурации мягкого робота в реальном времени на основе сигналов проприоцептивных датчиков. Хотя для мягких роботов было разработано несколько методов проприоцептивного восприятия и калибровки (Scharff et al., 2018; Van Meerbeek et al., 2018), прогнозирование сложных трехмерных (3D) конфигураций на основе данных этого датчика может быть затруднено. интерпретировать с использованием традиционных методов визуализации. В конечном итоге это приводит к сбоям в выполнении задач или неэффективному выполнению задач. Трехмерное моделирование мягкого робота в реальном времени на иммерсивном дисплее [т. е. расширенная реальность (XR)] значительно поможет оператору в удаленном управлении роботом. Помимо предоставления интуитивно понятного способа наблюдения за конфигурацией мягкого робота в трехмерном пространстве, XR позволяет отображать дополнительную информацию (например, расположение и величину внешних сил, действующих на робота, извлекаемую из дополнительных встроенных датчиков), относящуюся к моделируемому мягкому приводу. Кроме того, среда XR может быть связана со средой управления мягким роботом, так что реальным мягким роботом можно управлять, используя позу виртуального близнеца в качестве управляющего входа. Однако в настоящее время неясно, как можно использовать проприоцептивные сигналы для реконструкции трехмерной формы мягких роботов в расширенной реальности в режиме реального времени. Таким образом, эта работа посвящена следующему исследовательскому вопросу: как можно реконструировать трехмерную форму мягких роботов в режиме реального времени в XR?
Кроме того, среда XR может быть связана со средой управления мягким роботом, так что реальным мягким роботом можно управлять, используя позу виртуального близнеца в качестве управляющего входа. Однако в настоящее время неясно, как можно использовать проприоцептивные сигналы для реконструкции трехмерной формы мягких роботов в расширенной реальности в режиме реального времени. Таким образом, эта работа посвящена следующему исследовательскому вопросу: как можно реконструировать трехмерную форму мягких роботов в режиме реального времени в XR?
В этой работе мы представляем платформу с открытым исходным кодом для трехмерной реконструкции формы мягких роботов в реальном времени в XR (дополненная реальность (AR) и виртуальная реальность (VR)). Эффективность предложенной схемы реконструкции проверена на ранее разработанном приводе мягкого изгиба со встроенными проприоцептивными датчиками (Scharff et al., 2018 и Scharff et al., 2019). Сигналы от встроенных датчиков преобразуются в параметры виртуальной арматуры, которая затем управляет сеткой-представлением мягкого привода через каркас скелетной анимации Unity. Эта функциональность обеспечивается магистралью операционной системы роботов (ROS), которая взаимодействует со всеми компонентами и обеспечивает простую интеграцию с существующими программными платформами управления роботами (McKenzie et al., 2017). Подход демонстрируется в дополненной реальности (AR) (рис. 1) с использованием устройства Microsoft Hololens и работает со скоростью до 60 кадров в секунду. Кроме того, мы исследуем влияние параметров системы, таких как плотность сетки и сложность арматуры, на скорость реконструкции и масштабируемость. Параллельное сравнение эталонных кадров и AR-реконструкции показывает, что наша реконструкция точно отражает деформацию мягкого робота во время его взаимодействия с окружающей средой. Методы, используемые платформой и описанные в этой статье, можно разделить на две четкие фазы: фаза до реального времени, которая состоит из адаптации модели, сцены, датчика и устройства, и фаза реального времени, которая фокусируется на методах, которые запустите, чтобы преобразовать данные датчика в действенные данные анимации костей и каркасов для визуализации AR.
Эта функциональность обеспечивается магистралью операционной системы роботов (ROS), которая взаимодействует со всеми компонентами и обеспечивает простую интеграцию с существующими программными платформами управления роботами (McKenzie et al., 2017). Подход демонстрируется в дополненной реальности (AR) (рис. 1) с использованием устройства Microsoft Hololens и работает со скоростью до 60 кадров в секунду. Кроме того, мы исследуем влияние параметров системы, таких как плотность сетки и сложность арматуры, на скорость реконструкции и масштабируемость. Параллельное сравнение эталонных кадров и AR-реконструкции показывает, что наша реконструкция точно отражает деформацию мягкого робота во время его взаимодействия с окружающей средой. Методы, используемые платформой и описанные в этой статье, можно разделить на две четкие фазы: фаза до реального времени, которая состоит из адаптации модели, сцены, датчика и устройства, и фаза реального времени, которая фокусируется на методах, которые запустите, чтобы преобразовать данные датчика в действенные данные анимации костей и каркасов для визуализации AR. Работа организована следующим образом: Раздел 2 охватывает связанную работу в расширенной реальности для робототехники, реконструкции формы мягкого робота и скелетной анимации. Раздел 3 подробно описывает разработанную структуру реконструкции, начиная с подраздела до реального времени (раздел 3.3), за которым следуют методы реального времени (раздел 3.4). Экспериментальные установки, используемые при тестировании этого метода, кратко обсуждаются в разделе 4, а производительность платформы оценивается в разделе 5. Наконец, в разделе 6 обсуждаются выводы и будущая работа.
Работа организована следующим образом: Раздел 2 охватывает связанную работу в расширенной реальности для робототехники, реконструкции формы мягкого робота и скелетной анимации. Раздел 3 подробно описывает разработанную структуру реконструкции, начиная с подраздела до реального времени (раздел 3.3), за которым следуют методы реального времени (раздел 3.4). Экспериментальные установки, используемые при тестировании этого метода, кратко обсуждаются в разделе 4, а производительность платформы оценивается в разделе 5. Наконец, в разделе 6 обсуждаются выводы и будущая работа.
РИСУНОК 1 . (A) Сенсорный мягкий привод со встроенными датчиками цвета для проприоцепции (B) Цифровой двойник деформированного мягкого привода в режиме реального времени в дополненной реальности на основе измерений проприоцептивных датчиков.
2 Связанная работа
В этой главе мы обсудим связанную работу и рассмотрим различные области, вносящие вклад в эту публикацию. Мы начнем с расширенной реальности для робототехники, а затем перейдем к области мягкой робототехники в отношении реконструкции формы. Наконец, мы рассмотрим скелетную анимацию, которая является нашим подходом к 3D-анимации привода мягкого робота.
Мы начнем с расширенной реальности для робототехники, а затем перейдем к области мягкой робототехники в отношении реконструкции формы. Наконец, мы рассмотрим скелетную анимацию, которая является нашим подходом к 3D-анимации привода мягкого робота.
2.1 Расширенная реальность для робототехники
Различные исследования (Lorenz et al., 2015; Ludwig et al., 2018) показали, что производительность будущих производственных объектов будет пропорциональна способности людей общаться и взаимодействовать с интеллектуальными автоматизированными системами. машины и системы. В связи с растущей сложностью роботов и их рабочих мест (BCG Group, 2015), а также расширением их сотрудничества с людьми возникает потребность в достижениях в области взаимодействия человека с компьютером (HCI), в частности, в нашем случае, в Сотрудничество человека и робота (HRC) (Dianatfar et al., 2021). Расширенная реальность (XR) с ее подразделами дополненной, смешанной и виртуальной реальности (AR, MR, VR) предлагает ряд мощных инструментов и методов, которые можно использовать для упрощения, расширения и помощи в продуктивном взаимодействии между людьми и роботы. Внедрение XR в производство оказалось возможным, например, в инструкциях по ремонту на основе дополненной реальности (Aschenbrenner et al., 2019).) или отображение дополнительной информации на фабрике (Peake et al., 2016). Хотя по каждой теме, HRC и XR, были проведены значительные исследования, кросс-технологические исследования менее заметны, за очень немногими исключениями (Aschenbrenner et al., 2020). С ростом популярности использования цифровых двойников XR может служить способом взаимодействия с цифровым двойником в контексте его предполагаемой физической среды. Применительно к области HRC, XR может обеспечить связь в реальном времени между роботами и средами XR (например, Microsoft Hololens или Oculus Quest). Это повышает удобочитаемость робота и осведомленность пользователя о ситуации. Для таких задач было опубликовано несколько структур (Hussein et al., 2018; Babaians et al., 2018; Aschenbrenner and Rieder, 2021). В этой работе для этого приложения была выбрана и настроена платформа DTStacks (Rieder, 2021) на основе MQTT.
Внедрение XR в производство оказалось возможным, например, в инструкциях по ремонту на основе дополненной реальности (Aschenbrenner et al., 2019).) или отображение дополнительной информации на фабрике (Peake et al., 2016). Хотя по каждой теме, HRC и XR, были проведены значительные исследования, кросс-технологические исследования менее заметны, за очень немногими исключениями (Aschenbrenner et al., 2020). С ростом популярности использования цифровых двойников XR может служить способом взаимодействия с цифровым двойником в контексте его предполагаемой физической среды. Применительно к области HRC, XR может обеспечить связь в реальном времени между роботами и средами XR (например, Microsoft Hololens или Oculus Quest). Это повышает удобочитаемость робота и осведомленность пользователя о ситуации. Для таких задач было опубликовано несколько структур (Hussein et al., 2018; Babaians et al., 2018; Aschenbrenner and Rieder, 2021). В этой работе для этого приложения была выбрана и настроена платформа DTStacks (Rieder, 2021) на основе MQTT. Этот выбор протокола MQTT более подробно мотивируется в разделе 4, где делается вывод о том, что это протокол связи, наиболее подходящий для приложений реального времени и обладающий несколькими свойствами, полезными для конкретной функциональности в этой структуре.
Этот выбор протокола MQTT более подробно мотивируется в разделе 4, где делается вывод о том, что это протокол связи, наиболее подходящий для приложений реального времени и обладающий несколькими свойствами, полезными для конкретной функциональности в этой структуре.
2.3 Реконструкция формы мягкого робота
В этом подразделе основное внимание уделяется реконструкции формы мягкого робота на основе проприоцептивных сигналов. Проприоцептивное восприятие мягких роботов — это активная область исследований, направленная на разработку датчиков, способных фиксировать практически бесконечные степени свободы, большие деформации и большие деформации материала, не ограничивая деформации мягкого робота. Подробный обзор сенсорных технологий для мягких роботов см. в Wang et al. (2018).
После регистрации деформации мягкого робота необходимо восстановить форму робота на основе этой информации. Это сложная задача, требующая эффективной параметризации формы мягкого робота. Обычно используемые параметры формы для калибровки мягких роботизированных гибочных приводов — это, например, один угол изгиба (Elgeneidy et al. , 2018) или кривизна (Zhao et al., 2016). Такие модели чрезмерно упрощают пространство конфигурации робота и, следовательно, не способны точно описать конфигурации робота, которые возникают, когда мягкий привод взаимодействует с окружающей средой. В качестве альтернативы датчики были откалиброваны для прогнозирования ряда предопределенных точек на роботе (Thuruthel et al., 2019).; Шарфф и др., 2019). Однако оператору сложно визуализировать сложную трехмерную форму мягкого робота, основываясь только на наборе трехмерных координатных точек. Представление мягкого робота набором трехмерных кривых, таких как кусочная модель постоянной кривизны (Jones and Walker, 2006; Della Santina et al., 2020), модель стержня Коссера (Till et al., 2019), или поверхность Безье (Scharff et al., 2021) помогает оператору интерпретировать форму робота, но не может использоваться для визуализации внешнего вида мягкого робота. Внешний вид мягкого робота можно реконструировать в режиме реального времени в виде облака точек (Wang et al. , 2020). Однако это представление нельзя напрямую использовать для визуализации в XR. Эта работа посвящена представлению формы мягкого робота с помощью сетки на основе треугольников, чтобы обеспечить совместимость с современными графическими движками. В более широкой области реконструкции формы были применены определенные вычислительные методы для реконструкции сеток из различных источников данных, включая трехмерные облака точек (Янг и др., 2021 г.) или входные двумерные изображения (Колотоурос и др., 2019 г.).; Нгуен и др., 2022)). Наш метод основан на скелетной анимации для визуализации деформированной формы мягкого робота по данным датчика в режиме реального времени.
2.4 Скелетная анимация
Скелетная анимация была введена в 1988 году как метод деформации произвольных сеток для создания анимации с помощью иерархического «скелета» — набора узлов кинематического соединения с соответствующими жесткими преобразованиями (Magnenat-Thalmann et al., 1988). ). Скелетная анимация остается основным методом управления сложными трехмерными сетками в режиме реального времени (альтернативные методы для анимации сеток, такие как модели на основе симуляции (Terzopoulos et al. , 19).87; Sukumar and Malsch, 2006), хотя и являются точными, но не могут обеспечить решения для анимации в реальном времени, а методы на основе клеток (Nieto and Susín, 2013), которые используют решетчатую структуру для управления вершинами, не могут справиться со сложными деформациями и представляют трудности в иерархической композиции. ).
В алгоритме скиннинга закодированы как перевод между преобразованиями костей скелета, так и преобразования, применяемые к каждой из вершин сетки для осуществления деформации сетки. В литературе существует несколько подходов к метрикам скиннинга для деформации сеток (Rumman and Fratarcangeli, 2016): либо с помощью упрощенного механического моделирования на основе физики (Nealen et al., 2006; Sorkine and Alexa, 2007), либо с помощью методов, основанных на примерах ( Mukai, 2018), таких как сопоставление движения, в котором используются интерполированные примеры данных из реального мира или созданные художниками для деформации сетки. Наконец, у нас есть метрики, основанные на геометрии, которые напрямую используют преобразования скелета для вычисления окончательных преобразований вершин. Это стандартные методы создания скинов для интерактивных приложений из-за их относительной простоты и эффективности (Rumman and Fratarcangeli, 2016).
В этом исследовательском проекте используется гибридный подход, при котором использование этих стандартных конвейеров анимации позволяет деформировать сетку в реальном времени. Тем не менее, анимация управляется точной оценкой конфигурации мягкого привода, поступающей от его проприоцептивных датчиков. В результате наш подход эффективно сочетает точность и эффективность.
3 Методы
Этот раздел начинается с общего обзора всего конвейера, за которым следуют подразделы, в которых более подробно рассматривается сенсорный мягкий привод, этапы предварительной обработки и, наконец, обработка в реальном времени.
3.1 Обзор
На рис. 2 показан общий обзор среды реального времени. Он начинается в верхней левой области (рис. 2А, выделено синим цветом), где фактический физический привод деформируется из-за перепада давления воздуха в сильфоне. Датчики света внутри этих сильфонов выводят данные RGBC (красный, зеленый, синий, чистый), которые отправляются через USB на компьютер ROS на базе Linux (в данном случае Intel NUC). В среде ROS (рис. 2B, выделено зеленым цветом) эти необработанные данные датчика предварительно обрабатываются и передаются через ROS на следующий узел, где они служат входными данными для первой нейронной сети с прямой связью (FFNN), которая преобразует эти данные. в координаты маркера, процесс, описанный в Scharff et al. (2019).
РИСУНОК 2 . Схематический обзор структуры системы, которая преобразует измерения сенсорного мягкого привода (A) в трехмерную визуализацию в реальном времени с помощью голографических дисплеев. (B) обозначает среду ROS и программные узлы в ней, а (C) указывает узлы обработки в реальном времени платформы.
Следующие модули берут эти координаты маркеров и в конечном итоге преобразуют их в данные анимации «кости», используемые системой Unity. Кости соединяли два сустава в этих «скелетах». Они связаны с преобразованиями вершин сетки, что позволяет косвенно управлять сеткой через набор совместных преобразований скелета, а не вершин по отдельности. Этот процесс создания и слияния этого скелета называется риггингом, где каждая кость имеет жесткое трехмерное положение, вращение и масштаб, и влияет на часть меша, с которым она связана. В нашем методе этот процесс состоит из трех основных этапов: во-первых, на маркеры накладывается сплайн-кривая, выступающая в роли «основного скелета» текущей деформации актуатора; за которым следует этап интерполяции, определяющий положение и ориентацию анимационных «костей» в модели цифрового двойника привода. Используя информацию о производной более высокого порядка от интерполированной сплайновой функции, последний шаг упаковывает эти ориентации в единую структуру, так что полная деформация привода кодируется таким образом, который может передаваться и декодироваться сценарием Unity. Первоначально эти шаги выполнялись явно, но позже эти шаги были целостно закодированы с помощью второй FFNN (рис. 2C, выделено фиолетовым цветом). Таким образом, конвейер основан на следующих основных этапах: установка для настройки анимированной 3D-модели, сбор и обработка данных оптического датчика, реконструкция анимации из данных FFNN в набор конфигураций костей для скелетной анимации и рендеринг этого в реальном времени. данные через интерфейс Unity.
Эта структура данных пересылается с помощью транспорта телеметрии очереди сообщений (MQTT), который соединяет подсистемы ROS со средой Unity на HoloLens 2 через (локальный) брокер MQTT. В Unity кости 3D-модели со скинами и ригами обновляются с каждым новым полученным сообщением данных, что позволяет напрямую визуализировать модель через голографические дисплеи . Номинально это было сделано со скоростью до 60 FPS. Завершая этот обзор, фреймворк имеет следующие четыре требования для реконструкции мягких роботов:
1) У нас есть мягкий привод со встроенной (или внешней) обратной связью в режиме реального времени, который может передавать данные через последовательные порты на компьютер ROS (раздел 3. 2).
2).
2) У нас есть виртуальный двойник такого привода, т. е. 3D-модель, которую можно настроить для моделирования степеней свободы привода (раздел 3.3).
3) У нас есть некоторый метод встраивания сопоставления между этими необработанными данными привода и морфологией самого привода (в демонстрации этой работы мы использовали результаты предыдущей работы (Scharff et al., 2018), где это сделано с помощью метода на основе маркеров, датчиков цвета и FFNN).
4) У нас есть способ преобразования этих данных морфологии в данные оснастки/скининга сетки (подраздел 3.4.1).
3.2 Мягкий привод с сенсорным управлением
Структура реконструкции мягких роботов в режиме реального времени в XR применима к широкому спектру сенсорных мягких роботов. В этой работе мы демонстрируем структуру сенсорного мягкого пневматического изгибающего привода, показанного на рисунке 3А. Принцип восприятия основан на захвате напечатанных на 3D-принтере цветных узоров внутри воздушной камеры привода (рис. 3B) с помощью небольшого количества цветовых датчиков, встроенных в нерастяжимый слой привода. В процессе калибровки на основе машинного обучения изменение цвета, наблюдаемое датчиками цвета при деформации, использовалось для прогнозирования относительных 2D-координат шести маркеров, размещенных на мягком приводе. Эти параметры примитивной формы составляют основу для анимации 3D-модели привода с оснасткой. Для получения дополнительной информации о принципе измерения и процессе калибровки см. Scharff et al. (2018 г.); Шарфф и др. (2019). В этой работе мы используем набор данных калибровки и оценки открытого доступа (Scharff, 2021), созданный Scharff et al. (2019). Набор калибровочных данных состоит из измерений RGBC четырех датчиков цвета и соответствующих координат двумерных маркеров для 1000 различных конфигураций привода. Набор оценочных данных состоит из видео, где привод взаимодействует с различными объектами в сочетании с соответствующими измерениями RGBC.
3B) с помощью небольшого количества цветовых датчиков, встроенных в нерастяжимый слой привода. В процессе калибровки на основе машинного обучения изменение цвета, наблюдаемое датчиками цвета при деформации, использовалось для прогнозирования относительных 2D-координат шести маркеров, размещенных на мягком приводе. Эти параметры примитивной формы составляют основу для анимации 3D-модели привода с оснасткой. Для получения дополнительной информации о принципе измерения и процессе калибровки см. Scharff et al. (2018 г.); Шарфф и др. (2019). В этой работе мы используем набор данных калибровки и оценки открытого доступа (Scharff, 2021), созданный Scharff et al. (2019). Набор калибровочных данных состоит из измерений RGBC четырех датчиков цвета и соответствующих координат двумерных маркеров для 1000 различных конфигураций привода. Набор оценочных данных состоит из видео, где привод взаимодействует с различными объектами в сочетании с соответствующими измерениями RGBC.
РИСУНОК 3 . (A) Сенсорный Мягкий привод со встроенными четырьмя датчиками цвета и шестью красными маркерами на нерастяжимом слое. (B) Иллюстрация, демонстрирующая цветовую схему преобразования сигнала внутри воздушной камеры привода.
(A) Сенсорный Мягкий привод со встроенными четырьмя датчиками цвета и шестью красными маркерами на нерастяжимом слое. (B) Иллюстрация, демонстрирующая цветовую схему преобразования сигнала внутри воздушной камеры привода.
3.3 Этапы предварительной обработки
Прежде чем углубляться в среду реального времени, мы должны начать с краткого обсуждения шагов предварительной обработки, которые позволили создать такой конвейер.
Чтобы получить ранее упомянутого цифрового двойника привода, мы должны начать с 3D-сетки. Это было достигнуто с помощью набора инструментов Blender (Сообщество Blender, 2018). Перед этапами анимации модель цифрового двойника необходимо упростить, так как модель, изготовленная в САПР, содержит слишком много деталей. Как упоминалось ранее, производственная модель передискретизируется в блендере. Эта повторная выборка обеспечивает сетку, которая сгруппирована на поверхности с различной плотностью. Чтобы оптимизировать плотность сетки, применяются последовательные раунды алгоритмов прореживания и повторной триангуляции, пока мы не закончим топологию, которая максимизирует точность деталей с минимальным количеством вершин (как можно видеть на рисунке 4, где (рисунки 4B, C) представляют конфигурации, которые лучше всего закодировали эти желаемые характеристики).
РИСУНОК 4 . Различные визуализации выборки исходной модели САПР с уменьшением плотности сетки для каждой строки. Исходная CAD-модель была экспортирована из SOLIDWORKS, и в Blender она была сэмплирована с различной плотностью [ (A) 847 k verts, 1,7 M tris; (B) 82 тыс. вертикалей, 164 тыс. треугольников; (C) 13 тыс. верт, 26 тыс. трис; и (D) 3,2 тыс. вершин, 6 тыс. трис], после чего были применены алгоритмы прореживания/пересоздания сетки, которые упростили топологию сетки.
Мы используем стандартный для анимации метод скиннинга Linear Blend Skinning, который представляет собой прямой метод, основанный на геометрии (Lewis et al., 2000). Чтобы анимировать и деформировать набор костей скелета из одной «позы» в другую, где положение каждой вершины меша будет зависеть от следующего основного уравнения:
vit=∑j=0n−1wijBjtvrefi(1)
всегда определяется относительно скелета в его исходном положении, в нашем случае привод, когда все сильфоны не задействованы. Заданная поза переместит все вершины меша из этой начальной позиции позы (vrefi) в положение 9.0053 v i . В этой математической модели дано дерево суставов, составляющих скелет, и костей, соединяющих два сустава и управляющих ими, каждая вершина v i позиция относительно определенного времени ( t ) будет зависеть от линейной комбинации нескольких примитивов деформации. А именно, Bj(t)∈R3×4, относительное преобразование кости j кодирует преобразование связанного сустава j , относительно эталонной позы. w ij — набор грузов для снятия шкуры. Этот набор существует, потому что на одну вершину могут влиять несколько костей. Сумма этого множества на вершину по всем связанным с ней костям унитарна (∑j=0n−1wij=1). Конкретное разделение этого набора выполняется с помощью алгоритма скиннинга. В нашем случае влияние конкретной кости на вершину закодировано на этапе раскрашивания веса (рис.
Заданная поза переместит все вершины меша из этой начальной позиции позы (vrefi) в положение 9.0053 v i . В этой математической модели дано дерево суставов, составляющих скелет, и костей, соединяющих два сустава и управляющих ими, каждая вершина v i позиция относительно определенного времени ( t ) будет зависеть от линейной комбинации нескольких примитивов деформации. А именно, Bj(t)∈R3×4, относительное преобразование кости j кодирует преобразование связанного сустава j , относительно эталонной позы. w ij — набор грузов для снятия шкуры. Этот набор существует, потому что на одну вершину могут влиять несколько костей. Сумма этого множества на вершину по всем связанным с ней костям унитарна (∑j=0n−1wij=1). Конкретное разделение этого набора выполняется с помощью алгоритма скиннинга. В нашем случае влияние конкретной кости на вершину закодировано на этапе раскрашивания веса (рис. 5B).
5B).
РИСУНОК 5 . (A) Упрощенная трехмерная модель привода вместе с (B) , показывающая градиент окраски веса для третьей кости [от красного (максимальное влияние вершины) до темно-синего — нулевое влияние] для одного сильфона и соответствующей ему кости . Этот градиент является визуальным представлением весов вершин, установленных для этой сетки для третьей кости (Scharff et al. (2018))
. твердые 3D-печатные детали в конце. Поскольку основным степенем свободы этого «пальцевого» привода является сжатие/расширение сильфона под действием давления воздуха, и одновременное расширение сильфона, скелет оснастки прост, кость может контролировать положение каждого сегмента сильфона. , при этом оба конца привода соединены с секцией мягкого привода через фиксированные связи. Каждая кость имеет фиксированную связь друг с другом, так как они идеально центрированы в каждом сегменте сильфона. Окончательное положение кости параметризуется информацией о координатах положения маркера, которую мы получаем из конвейера обработки анимации из FFNN.
В конструкции актуатора подход к скиннингу был простым, с использованием линейного градиента, применяемого к костям, так что каждая кость влияет на соответствующий сильфон, за исключением базовой кости, которая прикреплена к основанию актуатора.
3.4 Обработка в режиме реального времени
3.4.1 Обработка анимации на основе данных оптического датчика
нерастяжимый слой привода. Каждый сегмент сильфона привода оснащен датчиком цвета, встроенным в нерастяжимый слой привода. Первая FFNN принимает данные датчика цвета RGBC в качестве входных данных и выводит координаты шести маркеров (X, Y, в миллиметрах). Он состоит из двух слоев со скрытым слоем (с сигмовидной передаточной функцией) с десятью нейронами, с выходным слоем, использующим линейную передаточную функцию. 16 необработанных входных данных датчика затем становятся 12 выходными координатами.
Окончательная анимационная поза скелета требует 3D-положения (относительно начала координат привода, т. е. маркера основания или присоединяемой части) и поворота каждой кости, поэтому для каждой позы скелета требуется 30 входных данных. Эта структура позы является разреженной из-за нерастяжимого материала, сжимающего мягкие сильфоны (например, базовый слой позвоночника, в который помещаются маркеры). Трехмерное положение сильфона можно получить с помощью координаты его ограничительного маркера (X,Y) относительно начала координат и угловой ориентации сильфона относительно его «покоя» (рис. 3А), где отклонение равно 0°, поскольку маркеры наземные координаты покоя известны априори. Поскольку каждая кость находится точно по центру между ограничивающими ее «базовыми» маркерами, ее ориентация и исходные координаты (X,Y) могут быть получены путем определения дифференцируемой интерполированной кусочно-кубической сплайновой кривой по координатам маркера. Этот кусочный полином соединяет позиции маркеров со сплайнами третьей степени. Гладкое поведение этого аппроксимированного сплайна означает, что информация о N-мерной производной для этой кривой доступна для любой точки, выбранной из нее.
е. маркера основания или присоединяемой части) и поворота каждой кости, поэтому для каждой позы скелета требуется 30 входных данных. Эта структура позы является разреженной из-за нерастяжимого материала, сжимающего мягкие сильфоны (например, базовый слой позвоночника, в который помещаются маркеры). Трехмерное положение сильфона можно получить с помощью координаты его ограничительного маркера (X,Y) относительно начала координат и угловой ориентации сильфона относительно его «покоя» (рис. 3А), где отклонение равно 0°, поскольку маркеры наземные координаты покоя известны априори. Поскольку каждая кость находится точно по центру между ограничивающими ее «базовыми» маркерами, ее ориентация и исходные координаты (X,Y) могут быть получены путем определения дифференцируемой интерполированной кусочно-кубической сплайновой кривой по координатам маркера. Этот кусочный полином соединяет позиции маркеров со сплайнами третьей степени. Гладкое поведение этого аппроксимированного сплайна означает, что информация о N-мерной производной для этой кривой доступна для любой точки, выбранной из нее. Исходное положение каждой кости выбирается из положения параметризованной кривой (относительно фактических расстояний в реальном приводе), а нормальная ориентация кости получается с помощью метода повернутой касательной. С помощью этого метода, учитывая исходное положение костей вдоль кривой, вектор нормали (n̂) к этой точке можно оценить с помощью повернутого нормализованного касательного вектора в этой точке самой кривой.
Исходное положение каждой кости выбирается из положения параметризованной кривой (относительно фактических расстояний в реальном приводе), а нормальная ориентация кости получается с помощью метода повернутой касательной. С помощью этого метода, учитывая исходное положение костей вдоль кривой, вектор нормали (n̂) к этой точке можно оценить с помощью повернутого нормализованного касательного вектора в этой точке самой кривой.
Этот вектор касательной вычисляется путем получения первой производной в положении кости вдоль параметрической формы этой кривой df⃗(bonei)dt (параметр t кодирует позицию вдоль кривой, для которой вычисляется эта касательная). Поскольку вектор нормали ортогонален этому касательному, его можно получить простым двумерным поворотом на 90° в положительном направлении. Как только этот вектор нормали нормализован, угловая ориентация кости может быть получена путем вычисления ее скалярного произведения с эталонным вектором координат кости в угловом положении покоя (ĵ): n̂⋅ĵ=|n̂‖ĵ|cos(θ)≡θ =arccos(n̂⋅ĵ), учитывая, что векторы являются базисными (| против | = 1).
В качестве альтернативы эти преобразования могут быть закодированы от начала до конца. После проверки предыдущего подхода к визуализации привода была разработана новая FFNN с той же структурой, что и первоначальная, за исключением выходного слоя, который имеет 14 узлов (параметры фиксированной позы, такие как исходная точка, исключены). В то время как полная поза скелета принимает 30 параметров, ограничения глубины резкости, присущие дизайну прототипа, позволяют зафиксировать эти параметры. Эта новая сеть была обучена с использованием алгоритма байесовской регуляризации с использованием стандартного разделения сквозных выборок (70% для обучения, 15% для проверочного набора, 15% для тестирования).
3.4.2 Рендеринг в дополненной реальности
На последнем этапе этой структуры данные скелетной анимации отправляются по локальной сети (локальному) брокеру MQTT и направляются в Hololens 2, на котором работает среда моделирования Unity в реальном времени. . Он состоит из сцены со сфальсифицированной 3D-моделью, в которой сценарий C# обновляет параметры каждой кости в соответствии с новым сообщением от брокера, чтобы составить окончательную скелетную позу привода. Чтобы предотвратить любые визуальные артефакты и сгладить временные сбои, конечные позы между последующими кадрами линейно интерполируются (как свободный параметр визуализации). Затем Hololens 2 визуализирует последние положения и повороты костей (3D-движение и вращение) для визуализации модели в режиме реального времени.
Чтобы предотвратить любые визуальные артефакты и сгладить временные сбои, конечные позы между последующими кадрами линейно интерполируются (как свободный параметр визуализации). Затем Hololens 2 визуализирует последние положения и повороты костей (3D-движение и вращение) для визуализации модели в режиме реального времени.
4 Экспериментальная установка
Как упоминалось ранее, в этой технике визуализации в реальном времени используется несколько инструментов. Их можно разделить примерно на два этапа: во-первых, взаимодействие с приводом, сбор данных и преобразование их в анимационную позу, а во-вторых, анимация виртуального двойника сфальсифицированного привода в настройке сцены AR. Мы использовали компьютер Intel NUC, который использовал операционную систему роботов (ROS) для сбора данных с датчика (через последовательный порт) в узле и передачи их на узел ROS анимации, который реализовал FFNN и создал данные позы анимации. . Для повторного сравнительного анализа альтернативных методов при аналогичных ограничениях необработанные данные об исполнительных механизмах предварительно собирались при установленных ограничениях в базу данных, которая затем передавалась непосредственно в остальную часть фреймворка. В системе был настроен MQTT-Bridge GROOVE-X (2020), который с помощью роутера отправлял анимационные позы через локальную сеть, через a (mosquitto) MQTT Broker, в HoloLens 2. HoloLens 2 получала сообщения MQTT через настроенную версию платформы MQTT «DTStacks» (Rieder, 2021). Этот протокол MQTT возник в области IoT (Интернет вещей). Он был выбран из-за того, что это стандартный отраслевой протокол с широкой поддержкой устройств/платформ (от веб-хостов до встроенных устройств), что обеспечивает максимальную гибкость при подключении частей нашей инфраструктуры и для будущей работы с минимальными усилиями пользователя. т. е. есть легкодоступные плагины, обрабатывающие связь во всех различных модулях фреймворка, не требующие дополнительной работы для накладных расходов на соединение. Его реализация проста, и это независимый от данных, легкий и эффективный способ беспроводной передачи данных. MQTT также оптимизирован для низкой задержки, поэтому он больше подходит для приложений реального времени, кроме того, он имеет открытый исходный код, легкий для использования в игровом движке для мобильного устройства и может использовать глобальные адреса.
В системе был настроен MQTT-Bridge GROOVE-X (2020), который с помощью роутера отправлял анимационные позы через локальную сеть, через a (mosquitto) MQTT Broker, в HoloLens 2. HoloLens 2 получала сообщения MQTT через настроенную версию платформы MQTT «DTStacks» (Rieder, 2021). Этот протокол MQTT возник в области IoT (Интернет вещей). Он был выбран из-за того, что это стандартный отраслевой протокол с широкой поддержкой устройств/платформ (от веб-хостов до встроенных устройств), что обеспечивает максимальную гибкость при подключении частей нашей инфраструктуры и для будущей работы с минимальными усилиями пользователя. т. е. есть легкодоступные плагины, обрабатывающие связь во всех различных модулях фреймворка, не требующие дополнительной работы для накладных расходов на соединение. Его реализация проста, и это независимый от данных, легкий и эффективный способ беспроводной передачи данных. MQTT также оптимизирован для низкой задержки, поэтому он больше подходит для приложений реального времени, кроме того, он имеет открытый исходный код, легкий для использования в игровом движке для мобильного устройства и может использовать глобальные адреса. Модель привода размещалась в фиксированном месте и управлялась на основе последней полученной структуры данных, при этом каждое полученное сообщение содержало всю необходимую информацию для всех соединений.
Модель привода размещалась в фиксированном месте и управлялась на основе последней полученной структуры данных, при этом каждое полученное сообщение содержало всю необходимую информацию для всех соединений.
Для подготовки сетей и запуска тестов набор данных был получен с помощью установки, в которой активный привод приводился в действие с помощью случайного давления и положения препятствия. В этот момент как состояние датчика, так и наземная деформация были зафиксированы камерой, при этом наземная достоверность была получена путем извлечения положения маркера из калиброванных изображений. Более подробную информацию об условиях построения этого набора данных можно найти в Scharff et al. (2019).
5 результатов
Платформа с открытым исходным кодом для трехмерной реконструкции формы мягких роботов в реальном времени в XR доступна в репозитории исследовательских данных 4TU (Borges and Rieder, 2021). Платформа включает в себя код ROS для взаимодействия с приводом, а также сценарии Unity, которые позволяют визуализировать данные живой анимации в AR. Код сопровождается обширной документацией, которая позволяет другим легко настраивать фреймворк. Чтобы другие могли сравнить результаты будущих реализаций предложенной схемы, изображения/видеоданные и соответствующие значения датчиков, которые использовались для калибровки мягкого привода и оценки схемы, также были доступны в Интернете (Scharff, 2021). Платформа может достигать пропускной способности 66 кадров в секунду. Устройство Hololens 2 AR требует, чтобы разработчики приложений поддерживали 60 кадров в секунду, что дает фреймворку бюджет задержки 16 мс для отправки новой позы в Unity. Демонстрация представляет собой сцену с низким уровнем сложности, поскольку к виртуальному двойнику мягкого робота не применяются текстуры с примерно 100 000 вершин. Таким образом, на стороне приложения единственным узким местом в производительности остаются фильтры постобработки (такие как тени/освещение). Это обеспечивает единый этап для тестирования производительности самой структуры.
Код сопровождается обширной документацией, которая позволяет другим легко настраивать фреймворк. Чтобы другие могли сравнить результаты будущих реализаций предложенной схемы, изображения/видеоданные и соответствующие значения датчиков, которые использовались для калибровки мягкого привода и оценки схемы, также были доступны в Интернете (Scharff, 2021). Платформа может достигать пропускной способности 66 кадров в секунду. Устройство Hololens 2 AR требует, чтобы разработчики приложений поддерживали 60 кадров в секунду, что дает фреймворку бюджет задержки 16 мс для отправки новой позы в Unity. Демонстрация представляет собой сцену с низким уровнем сложности, поскольку к виртуальному двойнику мягкого робота не применяются текстуры с примерно 100 000 вершин. Таким образом, на стороне приложения единственным узким местом в производительности остаются фильтры постобработки (такие как тени/освещение). Это обеспечивает единый этап для тестирования производительности самой структуры.
5.
 1 Оценка и сравнение
1 Оценка и сравнение
Начиная с Linear Blend Skinning (LBS), количество необходимых операций связано с двумя основными факторами: плотностью сетки и сложностью кости.
Есть два основных узких места в производительности анимации в этой настройке 1): количество костей данного скелета, так как вершина может использовать данные матрицы преобразования нескольких костей скелета (через набор параметров веса) и количество вершин сетки, которые необходимо преобразовать (это связано с тем, что процесс рендеринга зависит от вершин сетки). В качестве линейной операции (рис. 6) сохранение простой настройки сцены является прямым. Уменьшая плотность сетки с помощью алгоритмов децимации и ограничивая связанные пары костей определенными вершинами (в идеале, одной), можно ограничить количество обновлений параметров для новой позы сетки (это не всегда возможно, так как сложные деформации не могут быть обработаны). точно воспроизводится с одним влиянием кости на вершину). Из-за процесса 3D-печати, связанного с производством привода, модель CAD уже была доступна. Визуализация не требует плотности вершин, необходимой для изготовления (линейно коррелирует с производительностью анимации), и, поскольку в процессе скиннинга необходима только сетка внешней поверхности, эта необработанная преобразованная сетка из модели CAD была упрощена с использованием методов прореживания сетки (Gotsman et al. ., 2002), а именно кластеризация вершин вокруг внешней 3D-поверхности и прореживание исходной сетки с примерно 1 М вершин до примерно 100 000. Как видно на рисунке 4B, поведение мягкого робота не может быть воспроизведено с сеткой с самой низкой точностью, так как перекрытие между сильфонами делает невозможной арматуру кости-вершины, поскольку переходы сильфона требуют, чтобы вершина находилась под влиянием соседнего кости, хотя эти вершины составляют меньшинство полного меша. Хотя можно было бы применить дальнейшие оптимизации, эти преобразования уже позволили сократить количество необходимых операций в 12 раз, при этом эти параметры настраиваются для конкретной настройки сцены/актуатора, будь то в сторону большей точности или большей производительности.
Визуализация не требует плотности вершин, необходимой для изготовления (линейно коррелирует с производительностью анимации), и, поскольку в процессе скиннинга необходима только сетка внешней поверхности, эта необработанная преобразованная сетка из модели CAD была упрощена с использованием методов прореживания сетки (Gotsman et al. ., 2002), а именно кластеризация вершин вокруг внешней 3D-поверхности и прореживание исходной сетки с примерно 1 М вершин до примерно 100 000. Как видно на рисунке 4B, поведение мягкого робота не может быть воспроизведено с сеткой с самой низкой точностью, так как перекрытие между сильфонами делает невозможной арматуру кости-вершины, поскольку переходы сильфона требуют, чтобы вершина находилась под влиянием соседнего кости, хотя эти вершины составляют меньшинство полного меша. Хотя можно было бы применить дальнейшие оптимизации, эти преобразования уже позволили сократить количество необходимых операций в 12 раз, при этом эти параметры настраиваются для конкретной настройки сцены/актуатора, будь то в сторону большей точности или большей производительности.
РИСУНОК 6 . Операции с плавающей запятой для каждой позы, необходимые для скелетной сетки с использованием конвейера анимации блендера по умолчанию, в зависимости от сложности каркаса (количество пар костей, связанных с одной вершиной), с выделенным сравнением между сеткой, требующей 100 000 вершин, и сеткой с 1 M вершин, с предполагаемым отраслевым стандартом максимум четыре связанных пары костей на вершину.
Для конвейера анимации наибольшая задержка возникает на этапе обработки анимации. Общая структура занимает примерно (5,18 ± 1,42) мс, чтобы отправить новую информацию о позе в Unity. Для прямого прохода нейронной сети требуется (0,68 ± 0,09) мс, при этом секция сплайна и костной реконструкции занимает (3,30 ± 1,05) мс. При замене этих двух шагов целостной FFNN весь этот этап занимает (2,69 ± 0,10) мс; однако такая структура имеет недостатки с точки зрения надежности. Структурирование выходных данных и их отправка через соединение MQTT занимает (1,19 ± 0,31) мс, а сценарий анимации на стороне Unity занимает 9,62 ± 0,38 мс, что обеспечивает наилучшую системную частоту кадров около 65,88 кадров в секунду 1 .
Руководство Unity по производительности Hololens устанавливает определенные ограничения в сложности сцены для поддержания частоты кадров в таблице. LBS — это линейный алгоритм, означающий, что производительность анимации данного скелета линейно коррелирует между количеством его вершин, при этом коэффициент влияния множителя зависит от сложности каркаса (и, следовательно, кости). Несмотря на то, что матрица влияния является разреженной (из-за отраслевого стандарта не более четырех костей, соединенных с одной вершиной), точные факторы будут зависеть от процента вершин в скин-сетке, на которые влияет одна или несколько костей. В нашем случае простой актуатор имеет несколько зон множественного воздействия (в основном сильфонные зазоры). Рендеринг нескольких из этих приводов в сцене не ограничивается секцией конвейера анимации платформы — модульная природа ROS просто означает, что узел анимации может быть создан для каждого привода, эффективно распараллелив их, хотя это может добавить накладные расходы ввода-вывода, в зависимости от доступные порты ввода/вывода. Однако в среде hololens это нелегко адаптировать, линейная сложность анимации в отношении количества вершин означает, что сцена с десятью анимированными цифровыми двойниками будет иметь примерно 10-кратное снижение производительности. Тем не менее, это можно исправить, используя сетки с более низкой точностью (т. перед).
Однако в среде hololens это нелегко адаптировать, линейная сложность анимации в отношении количества вершин означает, что сцена с десятью анимированными цифровыми двойниками будет иметь примерно 10-кратное снижение производительности. Тем не менее, это можно исправить, используя сетки с более низкой точностью (т. перед).
Наконец, мы можем сравнить окончательную визуализацию с ожидаемыми положениями маркеров и изображениями наземной достоверности (рис. 7). Помимо точности базовой модели FFNN, которая более подробно оценивалась в предыдущей работе (Scharff et al., 2018), мы можем видеть, что по мере того, как деформации становятся более экстремальными, реконструкция становится менее точной. Это связано с несколькими причинами, среди которых тот факт, что полностью «нерастяжимый» слой является упрощением, разрыв, существующий между скиннинговой «моделью» актуатора и его реальными деформационными свойствами, и врожденная ошибка FFNN ( 0,0094 MSE между ожидаемыми результатами и выходными данными NN). Основные преимущества этих сетей заключаются в их фиксированной производительности и хорошей аппроксимации. В нашем случае простая FFNN всего с 338 тыс. параметров может воспроизвести фазу оценки кости по необработанным данным датчика с потерей надежности, но сделать это предсказуемо.
Основные преимущества этих сетей заключаются в их фиксированной производительности и хорошей аппроксимации. В нашем случае простая FFNN всего с 338 тыс. параметров может воспроизвести фазу оценки кости по необработанным данным датчика с потерей надежности, но сделать это предсказуемо.
РИСУНОК 7 . Демонстрация предлагаемой основы для привода с мягким изгибом. В первом столбце показан мягкий привод при различных давлениях срабатывания и внешних силах. Во втором столбце показаны координаты маркера, предсказанные на основе измерений датчика, а также сплайновые и костные векторы, рассчитанные на основе этих координат. В третьем столбце показан виртуальный двойник мягкого актуатора в среде Unity.
Видео моделирования, синхронизированное с кадрами реального мягкого привода, доступно вместе со статьей.
6 Заключение
Основной исследовательский вклад этой работы заключается в разработке масштабируемого и эффективного метода реконструкции формы мягкого робота в режиме реального времени в трехмерной среде. Предлагаемый метод использует преимущества стандартных методов реального времени, используемых в анимации и компьютерной графике, что позволяет использовать современные графические инструменты.
Предлагаемый метод использует преимущества стандартных методов реального времени, используемых в анимации и компьютерной графике, что позволяет использовать современные графические инструменты.
Ожидается, что платформа с открытым исходным кодом будет служить платформой для будущих исследований и разработок в области дистанционного управления в реальном времени мягкими роботами в средах, которые препятствуют прямому наблюдению за роботом. Более того, мы считаем, что эта структура может стать ценным инструментом для других исследователей для изучения мягкого робота в предполагаемой среде, чтобы определить возможные области для улучшения.
В этой работе каркас демонстрируется на мягком приводе, который изгибается только в плоскости. Однако этот подход можно легко распространить на трехмерно деформирующих мягких роботов, подгоняя трехмерный сплайн к нескольким точкам робота. Однако этот подход требует, чтобы форма мягкого робота могла быть аппроксимирована арматурой. Это относится к наиболее часто используемым конструкциям мягких роботов, таких как мягкие континуальные руки, приводы с мягким изгибом, искусственные мышцы и мягкие роботы, предназначенные для перистальтической локомоции. Подход применим к любому типу проприоцептивных сенсоров. Тем не менее, датчики должны быть откалиброваны по данным наземной достоверности, которые можно легко преобразовать в арматуру (например, используя стратегически размещенные маркеры, такие как в этой работе).
Подход применим к любому типу проприоцептивных сенсоров. Тем не менее, датчики должны быть откалиброваны по данным наземной достоверности, которые можно легко преобразовать в арматуру (например, используя стратегически размещенные маркеры, такие как в этой работе).
Мы считаем, что для минимальных накладных расходов пользователя методы на основе маркеров/геометрии обеспечивают хороший баланс этих соображений, поскольку продемонстрировано, что построение на основе фиксированных маркеров дает хорошие результаты для прогнозов морфологии актуатора на основе модели FFNN (Scharff et al., 2018) . Этот метод, основанный на маркерах/геометрии, может быть более просто параметризован в соответствии со стандартом Bone/Armature, как показано в этой работе, с производительностью и высокой пропускной способностью, необходимыми для работы в режиме реального времени (как оценивалось в разделе 5.1). Использование такого подхода для других мягких роботов заключается в основном в переобучении модели FFNN и настройке метода оценки костей в соответствии с новым цифровым двойником, а также в настройке XR-сцены в соответствии с желаемым сценарием.
Будущая работа будет сосредоточена на отображении дополнительной информации об окружающей среде или состоянии робота в моделировании (например, место контакта или распределение нагрузки). Кроме того, будущая работа может быть сосредоточена на интеграции не только моделирования, но и управления мягким роботом через ROS (пример управления мягким роботом через ROS продемонстрирован в McKenzie et al. (2017)). Эта интеграция может обеспечить взаимодействие между мягким роботом и его виртуальным двойником. Например, в то время как мягкий робот в настоящее время управляет реконструкцией, им также можно управлять, используя позу виртуального близнеца в качестве управляющего входа.
Наконец, фреймворк можно дополнительно оптимизировать, автоматизировав этапы создания скинов и оснастки, уменьшив визуальные сбои, возникающие на этапах децимации меша, и упростив накладные расходы фреймворка, чтобы обеспечить более сложную и реалистичную визуализацию (сложное освещение, тени, мультиматериалы). мягкие роботы).
мягкие роботы).
Заявление о доступности данных
Наборы данных, сгенерированные и проанализированные для этого исследования, можно найти в репозитории исследовательских данных 4TU. Доступ к фреймворку для трехмерной реконструкции формы мягких роботов в XR (Borges and Rieder, 2021) можно получить по следующей ссылке: https://data.4tu.nl/articles/software/Soft_Gripper_AR_Framework/169.43254. Доступ к изображениям/видеоданным и соответствующим значениям датчиков, которые использовались для калибровки мягкого привода и оценки структуры Scharff (2021), можно получить по следующей ссылке: https://data.4tu.nl/articles/dataset /Sensorized_Soft_Actuator_Datasets/16943239.
Вклад авторов
EB — Концептуализация, методология, программное обеспечение, проверка, формальный анализ, исследование, обработка данных, написание — первоначальный проект, визуализация. JR — Программное обеспечение, проверка, исследование, обработка данных, написание — обзор и редактирование. DA — Написание — обзор и редактирование, контроль, ресурсы. RS — Концептуализация, методология, написание — первоначальный проект, авторский надзор.
DA — Написание — обзор и редактирование, контроль, ресурсы. RS — Концептуализация, методология, написание — первоначальный проект, авторский надзор.
Финансирование
Этот проект использует ресурсы проекта Mirrorlabs, финансируемого EIT Manufacturing.
Конфликт интересов
Авторы заявляют, что исследование проводилось при отсутствии каких-либо коммерческих или финансовых отношений, которые могли бы быть истолкованы как потенциальный конфликт интересов.
Примечания издателя
Все утверждения, изложенные в этой статье, принадлежат исключительно авторам и не обязательно представляют претензии их дочерних организаций, издателя, редакторов и рецензентов. Любой продукт, который может быть оценен в этой статье, или претензии, которые могут быть сделаны его производителем, не гарантируются и не поддерживаются издателем.
Дополнительный материал
Дополнительный материал к этой статье можно найти в Интернете по адресу: https://www.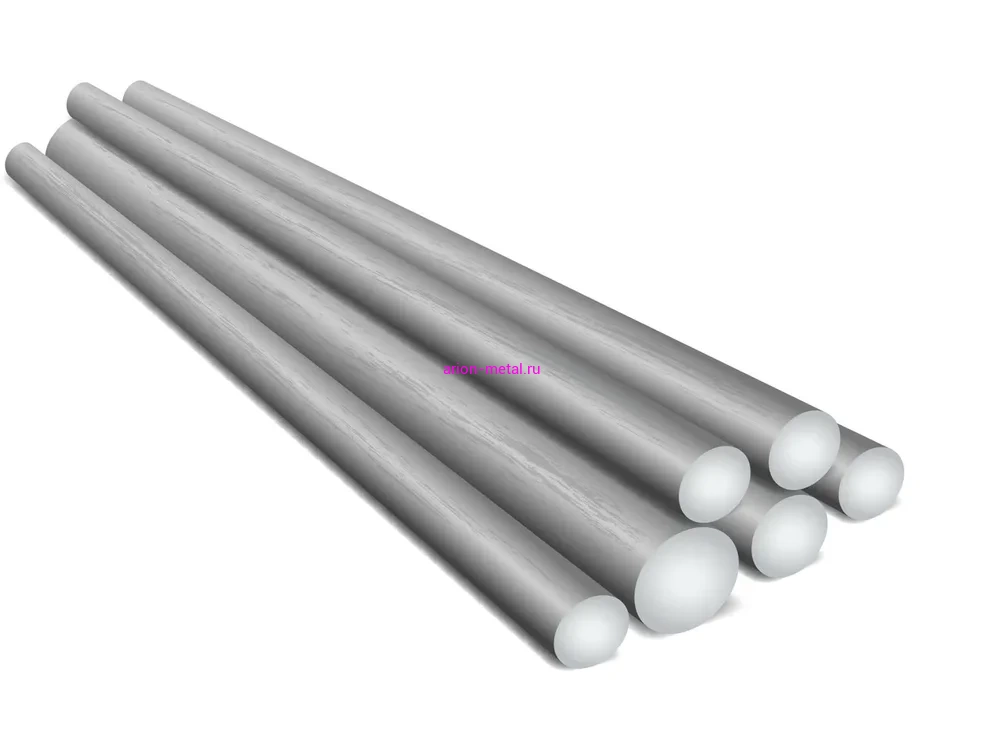 frontiersin.org/articles/10.3389/frobt.2022.810328/full#supplementary-material
frontiersin.org/articles/10.3389/frobt.2022.810328/full#supplementary-material
Дополнительное видео S1 | Параллельное сравнение сенсорного мягкого привода и его виртуального двойника в дополненной реальности.
Сноски
1 Unity содержит определенную задержку. Данные костей обновляются только со следующим кадром. То есть у нас есть задержка рендеринга до 16 мс, однако этот «сдвиг» не заметен для пользователя.
Ссылки
Aschenbrenner, D., Leutert, F., Çençen, A., Verlinden, J., Schilling, K., Latoschik, M., et al. (2019). Сравнение человеческого фактора для дополненной реальности, поддерживаемой однопользовательскими и совместными операциями по ремонту промышленных роботов. Перед. Робот. AI 6, 37. doi:10.3389/frobt.2019.00037
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Ашенбреннер Д. и Ридер Дж. (2021). [Набор данных]. Основа для публикации: Mirrorlabs — создание аналогичной среды обучения для студентов по всей Европе для совместного производства роботов и человека . 2020 21-й международный симпозиум IEEE на тему «Мир беспроводных, мобильных и мультимедийных сетей» (WoWMoM). doi:10.4121/14186807.v1
2020 21-й международный симпозиум IEEE на тему «Мир беспроводных, мобильных и мультимедийных сетей» (WoWMoM). doi:10.4121/14186807.v1
CrossRef Полный текст | Google Scholar
Aschenbrenner, D., Rieder, JSI, van Tol, D., van Dam, J., Rusak, Z., Blech, J. O., et al. (2020). «Mirrorlabs — Создание доступных цифровых близнецов роботизированной производственной среды со смешанной реальностью», Международная конференция IEEE по искусственному интеллекту и виртуальной реальности (AIVR, 2020 г.), 43–48. Дои: 10.1109/AIVR50618.2020.00017
CrossRef Полный текст | Google Scholar
Бабаянс Э., Тамиз М., Сарфи Ю., Могои А. и Мехраби Э. (2018). «ROS2Unity3D; Высокопроизводительный плагин для взаимодействия ROS с движком Unity3d», в 2018 г. 9-я конференция по искусственному интеллекту и робототехнике и 2-й Азиатско-Тихоокеанский международный симпозиум, 2018 г. 9-я конференция по искусственному интеллекту и робототехнике и 2-й Азиатско-Тихоокеанский международный симпозиум, остров Киш, Иран. Доступно по ссылке: https://ieeexplore.ieee.org/xpl/conhome/8764285/proceeding, 59–64. doi:10.1109/AIAR.2018.8769798
Доступно по ссылке: https://ieeexplore.ieee.org/xpl/conhome/8764285/proceeding, 59–64. doi:10.1109/AIAR.2018.8769798
CrossRef Full Text | Google Scholar
Бай Х., Ли С., Баррейрос Дж., Ту Ю., Поллок Ч. Р. и Шеперд Р. Ф. (2020). Растягивающиеся распределенные волоконно-оптические датчики. Наука 370, 848–852. doi:10.1126/science.aba5504
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
BCG Group (2015). [Набор данных]. Доклад о человеке и машине в Индустрии 4.0: как технологии изменят рабочую силу в промышленности до 2025 года? .
Google Scholar
Борхес, Э. А., и Ридер, Дж. С. (2021). [Набор данных]. Мягкий захват AR Framework . doi:10.4121/16943254.v1
CrossRef Full Text | Google Scholar
Кальдерон, А. А., Угалде, Дж. К., Загал, Дж. К., и Перес-Арансибия, Н. О. (2016). «Проектирование, изготовление и управление мягким роботом из нескольких материалов и несколькими приводами, вдохновленными роющими червями», Международная конференция IEEE по робототехнике и биомиметике (ROBIO), 2016 г. , 3–7 декабря 2016 г., Циндао, Китай, 31–38. . Дои: 10.1109/ROBIO.2016.7866293
, 3–7 декабря 2016 г., Циндао, Китай, 31–38. . Дои: 10.1109/ROBIO.2016.7866293
CrossRef Полный текст | Google Scholar
Чен Дж., Чжан Дж., Луо З., Чжан Дж., Ли Л., Су Ю. и др. (2020). Сверхэластичный, чувствительный и малогистерезисный гибкий датчик деформации на основе волнообразного жидкого металла для мониторинга активности человека. Приложение ACS Матер. Интер. 12, 22200–22211. doi:10.1021/acsami.0c04709
PubMed Abstract | Полный текст перекрестной ссылки | Сообщество Google Scholar
, BO (2018). Blender — пакет для 3D-моделирования и рендеринга . Амстердам: Фонд Blender, Stichting Blender Foundation.
Google Scholar
Калха У., Нурзаман С., Клеменс Ф. и Иида Ф. (2014). Svas3: Сенсоризация мягких структур с помощью вектора деформации. Датчики 14, 12748–12770. doi:10.3390/s140712748
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Де Фокатиис, Д. С. А., Халл, Д., и Санчес-Валенсия, А. (2012). Роль предварительной деформации и гистерезиса в пьезосопротивлении проводящих эластомеров для приложений датчиков деформации. Пластмассы, резина и композиты 41, 301–309. doi:10.1179/1743289812y.0000000022
(2012). Роль предварительной деформации и гистерезиса в пьезосопротивлении проводящих эластомеров для приложений датчиков деформации. Пластмассы, резина и композиты 41, 301–309. doi:10.1179/1743289812y.0000000022
CrossRef Full Text | Google Scholar
Делла Сантина, К., Бикки, А., и Рус, Д. (2020). Об улучшенной параметризации состояния мягких роботов с кусочно-постоянной кривизной и ее использовании в управлении на основе моделей. Робот IEEE. автомат. лат. 5, 1001–1008. doi:10.1109/lra.2020.2967269
CrossRef Полный текст | Google Scholar
Дианатфар М., Латокартано Дж. и Ланц М. (2021). Обзор существующих решений виртуальной и дополненной реальности для совместной работы человека и робота. Обработано. CIRP 97, 407–411. doi:10.1016/j.procir.2020.05.259
CrossRef Полный текст | Google Scholar
Элгенейди К., Лозе Н. и Джексон М. (2018). Прогнозирование угла изгиба и управление мягкими пневматическими приводами со встроенными датчиками изгиба — подход, основанный на данных. Мехатроника 50, 234–247. doi:10.1016/j.mechatronics.2017.10.005
Мехатроника 50, 234–247. doi:10.1016/j.mechatronics.2017.10.005
CrossRef Полный текст | Google Scholar
Гоцман К., Гамхольд С. и Коббельт Л. (2002). Упрощение и сжатие 3D-сеток . Берлин, Гейдельберг: Springer Berlin Heidelberg, 319–361. doi:10.1007/978-3-662-04388-2_12
Полный текст CrossRef | Google Scholar
GROOVE-X (2020). [Набор данных]. MQTT-мост .
Google Scholar
Хусейн А., Гарсия Ф. и Олаверри-Монреаль К. (2018). «Структура на основе Ros и Unity для управления и моделирования интеллектуальных транспортных средств», Международная конференция IEEE по автомобильной электронике и безопасности (ICVES, 2018 г.). 12-14 сентября. 2018, Мадрид, Испания. Дои: 10.1109/ICVES.2018.8519522
CrossRef Полный текст | Google Scholar
Джонс, Б. А., и Уокер, И. Д. (2006). Кинематика многосекционных роботов сплошной среды. IEEE Trans. Робот. 22, 43–55. doi:10.1109/tro.2005.861458
CrossRef Полный текст | Google Scholar
Колотурос Н. , Павлакос Г. и Данилидис К. (2019). «Регрессия сверточной сетки для реконструкции формы человека по одному изображению», Конференция IEEE / CVF по компьютерному зрению и распознаванию образов (CVPR), 2019 г., 449.6–4505. 15-20 июня 2019 г., Мадрид, Испания. doi:10.1109/cvpr.2019.00463
, Павлакос Г. и Данилидис К. (2019). «Регрессия сверточной сетки для реконструкции формы человека по одному изображению», Конференция IEEE / CVF по компьютерному зрению и распознаванию образов (CVPR), 2019 г., 449.6–4505. 15-20 июня 2019 г., Мадрид, Испания. doi:10.1109/cvpr.2019.00463
Полный текст CrossRef | Google Scholar
Льюис Дж. П., Корднер М. и Фонг Н. (2000). «Деформация позы в пространстве», в SIGGRAPH ’00: Материалы 27-й ежегодной конференции по компьютерной графике и интерактивным методам. Новый Орлеан, Луизиана, США, 23–28 июля 2000 г. (США: ACM Press/Addison-Wesley Publishing Co.), 165–172. doi:10.1145/344779.344862
CrossRef Полный текст | Google Scholar
Лин, X., Виллемет, Л., Байль, А. и Виртлевски, М. (2020). «Определение кривизны с помощью сферического тактильного датчика с использованием цветовой интерференции массива маркеров», Международная конференция IEEE по робототехнике и автоматизации (ICRA), 31 мая – 31 августа 2020 г., Париж, Франция, 603–609. . doi:10.1109/icra40945.2020.50
. doi:10.1109/icra40945.2020.50
CrossRef Full Text | Google Scholar
Лоренц М., Рюссманн М., Штрак Р., Люет К.Л. и Болле М. (2015). Человек и машина в индустрии 4.0: как технологии изменят рабочую силу в промышленности до 2025 года , 2. Германия: The Boston Consulting Group.
Google Scholar
Людвиг Т., Коттхаус К., Штейн М., Пипек В. и Вульф В. (2018). «Возродить старые обсуждения! Социально-технические проблемы для малых и средних предприятий в рамках Индустрии 4.0», в материалах 16-й Европейской конференции по совместной работе с компьютерной поддержкой. Нанси (Франция) 4-8 июня 2018 г. (Европейское общество социально встроенных технологий EUSSET)
Google Scholar
Лунни Д., Джордано Г., Синибальди Э., Чианкетти М. и Маццолаи Б. (2018). «Оценка формы на основе фильтрации Калмана: на пути к полностью мягкой проприоцепции», Международная конференция IEEE по мягкой робототехнике (RoboSoft), 24–28 апреля 2018 г., Ливорно, Италия, 541–546. doi:10.1109/ROBOSOFT.2018.8405382
doi:10.1109/ROBOSOFT.2018.8405382
CrossRef Full Text | Google Scholar
Магненат-Тальманн Н., Лаперьер А. и Тальманн Д. (1988). «Локальные деформации, зависящие от суставов, для ручной анимации и захвата объектов», в GI ’88: Proceedings of Graphics Interface ’88, 6-10 июня, 1988, Эдмонтон, Альберта, Канада. (Торонто, Онтарио, Канада: Канадское общество связи человека и компьютера), 26–33.
Google Scholar
Маццолаи Б., Мондини А., Трамасере Ф., Риккоми Г., Садеги А., Джордано Г. и др. (2019). Мягкая рука, вдохновленная осьминогом, с присосками для улучшенных задач захвата в ограниченном пространстве. Доп. Интел. Сист. 1, 11. doi:10.1002/aisy.2011
CrossRef Full Text | Google Scholar
Маккензи Р. М., Барраклаф Т. В. и Стоукс А. А. (2017). Интеграция мягкой робототехники с операционной системой роботов: гибридная рука для захвата и размещения. Фронт. Робот. AI 4, 39. doi:10.3389/frobt.2017.00039
CrossRef Full Text | Google Scholar
Мукаи, Т. (2018). Анимация создания скинов на основе примеров . Чам: Springer International Publishing, 2093–2112. doi:10.1007/978-3-319-14418-4_14
(2018). Анимация создания скинов на основе примеров . Чам: Springer International Publishing, 2093–2112. doi:10.1007/978-3-319-14418-4_14
CrossRef Full Text | Google Scholar
Нилен А., Мюллер М., Кайзер Р., Боксерман Э. и Карлсон М. (2006). Физически обоснованные деформируемые модели в компьютерной графике. Вычисл. Графика Форум 25, 809–836. doi:10.1111/j.1467-8659.2006.01000.x
CrossRef Full Text | Google Scholar
Нгуен Х., Новак Э. и Ван З. (2022). Точная 3D-реконструкция с помощью сети Fringe-to-Phase. Measurement 190, 110663. doi:10.1016/j.measurement.2021.110663
CrossRef Полный текст | Google Scholar
Нието, Дж. Р., и Сусин, А. (2013). «Деформации на основе клетки: обзор», в Модели деформации (Дордрехт: Springer), 75–99. дои: 10.1007/978-94-007-5446-1_3
CrossRef Полный текст | Google Scholar
Пик, И. Д., Блех, Дж. О., и Шембри, М. (2016). «Программная среда для поддержки промышленных операций на основе дополненной реальности», в 2016 г. 21-я Международная конференция IEEE по новым технологиям и автоматизации производства (ETFA), 1–4. 6-9 сентября 2016 г., Берлин, Германия. doi:10.1109/etfa.2016.7733627
21-я Международная конференция IEEE по новым технологиям и автоматизации производства (ETFA), 1–4. 6-9 сентября 2016 г., Берлин, Германия. doi:10.1109/etfa.2016.7733627
CrossRef Full Text | Google Scholar
Ридер, Дж. (2021). [Набор данных]. DTStacks .
Google Scholar
Румман, Н. А., и Фратаркангели, М. (2016). «Современное состояние методов создания скинов для сочлененных деформируемых персонажей», в материалах 11-й совместной конференции по теории и приложениям компьютерного зрения, обработки изображений и компьютерной графики. VISIGRAPP, 27-29 февраля 2016 г., г. Рим, Италия. doi:10.5220/0005720101980210
CrossRef Full Text | Google Scholar
Рансиман М., Дарзи А. и Милонас Г. П. (2019). Мягкая робототехника в малоинвазивной хирургии. Soft Robotics 6, 423–443. doi:10.1089/soro.2018.0136
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Сарех С., Нох Ю., Ли М., Ранцани Т., Лю Х. и Альтофер К. (2015). Оптическое зондирование Macrobend для измерения положения мягких манипуляторов роботов. Умный мастер. Структура 24, 125024. doi:10.1088/0964-1726/24/12/125024
(2015). Оптическое зондирование Macrobend для измерения положения мягких манипуляторов роботов. Умный мастер. Структура 24, 125024. doi:10.1088/0964-1726/24/12/125024
CrossRef Полный текст | Google Scholar
Шарфф Р. Б. Н., Дорнбуш Р. М., Дубровски Э. Л., Ву Дж., Гераэдтс Дж. М. П. и Ван С. С. Л. (2019 г.)). Цветовая проприоцепция мягких приводов, взаимодействующих с объектами. Ieee/asme Trans. Мехатрон. 24, 1964–1973 гг. doi:10.1109/tmech.2019.2929818
Полный текст CrossRef | Google Scholar
Шарфф Р. Б. Н., Дорнбуш Р. М., Клутвийк С. Л., Доши А. А., Дубровски Э. Л., Ву Дж. и др. (2018). «Цветовое определение деформации изгиба мягких роботов», Международная конференция IEEE по робототехнике и автоматизации (ICRA), 21–25 мая 2018 г., Брисбен, Квинсленд, Австралия. 4181–4187. Дои: 10.1109/icra.2018.8460521
CrossRef Полный текст | Google Scholar
Шарфф, Р. Б. Н., Фанг, Г., Тиан, Ю., Ву, Дж., Гераэдтс, Дж. М. П., и Ван, К. С. Л. (2021). Обнаружение и реконструкция трехмерной деформации пневматических мягких роботов. IEEE/ASME Trans. Мехатроника 1, 1877–1885 гг. doi:10.1109/tmech.2021.3078263
С. Л. (2021). Обнаружение и реконструкция трехмерной деформации пневматических мягких роботов. IEEE/ASME Trans. Мехатроника 1, 1877–1885 гг. doi:10.1109/tmech.2021.3078263
CrossRef Full Text | Google Scholar
Шарфф, Р. (2021). [Набор данных]. Наборы данных сенсорного мягкого привода . doi:10.4121/16943239.v2
Полнотекстовая перекрестная ссылка | Google Scholar
Соркин О. и Алекса М. (2007). «Моделирование поверхности настолько жестко, насколько это возможно», в SGP ’07: Материалы Пятого симпозиума Eurographics по обработке геометрии. Барселона, Испания, 4–6 июля 2007 г. (Гослар, DEU: Eurographics Association), 109–116.
Google Scholar
Сотер Г., Хаузер Х., Конн А., Росситер Дж. и Накадзима К. (2020). «Реконструкция формы мягких тактильных датчиков на основе ПЗС-камеры», на Международной конференции IEEE/RSJ по интеллектуальным роботам и системам. 24 октября — 24 января 2021 г., Лас-Вегас, Невада, США. Дои: 10.1109/iros45743. 2020.9341698
2020.9341698
CrossRef Полный текст | Google Scholar
Сукумар Н. и Мальш Э. А. (2006). Последние достижения в построении многоугольных интерполянтов конечных элементов. Арх. Вычислительные методы инж. 1313 (1), 129129–163163. doi:10.1007/BF02
3
Полный текст CrossRef | Google Scholar
Такаяма Т., Такэсима Х., Хори Т. и Омата Т. (2015). Локомотив с витыми связками труб, предложенный для мобильного робота внутри трубы. Ieee/asme Trans. Мехатрон. 20, 2915–2923. doi:10.1109/TMECH.2015.2411752
CrossRef Full Text | Google Scholar
Терзопулос Д., Платт Дж., Барр А. и Флейшер К. (1987). Упругодеформируемые модели. SIGGRAPH Вычисл. График 21, 205–214. doi:10.1145/37402.37427
CrossRef Полный текст | Google Scholar
Турутель, Т. Г., Ши, Б., Ласки, К., и Толли, М. Т. (2019). Восприятие мягкого робота с использованием встроенных мягких датчиков и рекуррентных нейронных сетей. Науч. Робот 4, eaau2489. doi:10.1126/scirobotics.aav1488
doi:10.1126/scirobotics.aav1488
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Тилль Дж., Алои В. и Ракер К. (2019). Динамика мягких и сплошных роботов в реальном времени на основе моделей стержней Коссера. Междунар. Дж. Робототехника Рез. 38, 723–746. doi:10.1177/02783642269
Полный текст CrossRef | Google Scholar
ван ден Берг С.К., Шарфф Р.Б.Н., Русак З. и Ву Дж. (2020). «Биомиметический дизайн мягкой роботизированной рыбы для высокоскоростной локомоции», в Биомиметические и биогибридные системы (Cham: Springer International Publishing), 366–377. doi:10.1007/978-3-030-64313-3_35
CrossRef Full Text | Google Scholar
Van Meerbeek, I.M., De Sa, CM, and Shepherd, RF (2018). Мягкие оптоэлектронные сенсорные пены с проприоцепцией. Науч. Робот 3. doi:10.1126/scirobotics.aau2489
CrossRef Full Text | Google Scholar
Ван, Х., Тотаро, М., и Беккай, Л. (2018). На пути к восприимчивым мягким роботам: прогресс и вызовы. Доп. науч. 5, 1800541. doi:10.1002/advs.201800541
Доп. науч. 5, 1800541. doi:10.1002/advs.201800541
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Ван Р., Ван С., Ду С., Сяо Э., Юань В. и Фэн К. (2020). Трехмерная проприоцепция мягкого тела в реальном времени с помощью сенсоров на основе глубокого зрения. Робот IEEE. автомат. лат. 5, 3382–3389. doi:10.1109/lra.2020.2975709
CrossRef Полный текст | Google Scholar
Ван X., Го Р. и Лю Дж. (2019). Мягкая робототехника на основе жидкого металла: материалы, конструкции и приложения. Доп. Матер. Тех. 4, 1800549. doi:10.1002/admt.201970009
CrossRef Full Text | Google Scholar
Ward-Cherrier, B., Pestell, N., Cramphorn, L., Winstone, B., Giannaccini, M.E., Rossiter, J., et al. (2018). Семейство TacTip: мягкие оптические тактильные датчики с биомиметическими морфологиями, напечатанными на 3D-принтере. Soft Robotics 5, 216–227. doi:10.1089/soro.2017.0052
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Ян М. , Вен Ю., Чен В., Чен Ю. и Цзя К. (2021). «Глубоко оптимизированные априорные модели для трехмерного моделирования и реконструкции», на конференции IEEE/CVF по компьютерному зрению и распознаванию образов (CVPR) 2021 г., 20–25 июня 2021 г., Нэшвилл, Теннесси, США. 3268–3277. Дои: 10.1109/cvpr46437.2021.00328
, Вен Ю., Чен В., Чен Ю. и Цзя К. (2021). «Глубоко оптимизированные априорные модели для трехмерного моделирования и реконструкции», на конференции IEEE/CVF по компьютерному зрению и распознаванию образов (CVPR) 2021 г., 20–25 июня 2021 г., Нэшвилл, Теннесси, США. 3268–3277. Дои: 10.1109/cvpr46437.2021.00328
CrossRef Полный текст | Google Scholar
Чжао Х., О’Брайен К., Ли С. и Шеперд Р. Ф. (2016). Мягкий протез руки с оптоэлектронной иннервацией через растягиваемые оптические волноводы. Науч. Робот 1, eaai7529. doi:10.1126/scirobotics.aai7529
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Платформа для трехмерной реконструкции формы сенсорных мягких роботов на основе арматуры в расширенной реальности
- Список журналов
- Передний робот ИИ
- т.
 9; 2022
9; 2022 - PMC
52
Передний робот ИИ. 2022 г.; 9: 810328.
Опубликовано в сети 28 апреля 2022 г. doi: 10.3389/frobt.2022.810328
,
1
, * ,
1
,
1
,
2
и
3
, *
Информация об авторе Примечания к статье Информация об авторских правах и лицензиях Отказ от ответственности
- Дополнительные материалы
- Заявление о доступности данных
Мягкие роботы, как правило, предназначены для работы в крайне непредсказуемой среде. Хотя их мягкие тела помогают им пассивно приспосабливаться к окружающей среде, выполнение конкретных задач в таких средах часто требует помощи оператора, который наблюдает за взаимодействием между роботом и его средой и регулирует входные сигналы для успешного выполнения задачи. . Однако прямому наблюдению за мягким роботом часто препятствует среда, в которой он работает. Следовательно, оператор должен полагаться на моделирование мягкого робота в реальном времени на основе сигналов проприоцептивных датчиков. Однако сложные трехмерные (3D) конфигурации мягкого робота могут быть трудны для интерпретации с использованием традиционных методов визуализации. В этой работе мы представляем платформу с открытым исходным кодом для трехмерной реконструкции мягких роботов в режиме реального времени в расширенной реальности (дополненной и виртуальной реальности) на основе сигналов их проприоцептивных датчиков. Эта структура имеет основу операционной системы роботов (ROS), что позволяет легко интегрироваться с существующими программными алгоритмами управления роботами для интуитивно понятного дистанционного управления в реальном времени. Этот подход демонстрируется в дополненной реальности с использованием устройства Microsoft Hololens и работает со скоростью до 60 кадров в секунду.
. Однако прямому наблюдению за мягким роботом часто препятствует среда, в которой он работает. Следовательно, оператор должен полагаться на моделирование мягкого робота в реальном времени на основе сигналов проприоцептивных датчиков. Однако сложные трехмерные (3D) конфигурации мягкого робота могут быть трудны для интерпретации с использованием традиционных методов визуализации. В этой работе мы представляем платформу с открытым исходным кодом для трехмерной реконструкции мягких роботов в режиме реального времени в расширенной реальности (дополненной и виртуальной реальности) на основе сигналов их проприоцептивных датчиков. Эта структура имеет основу операционной системы роботов (ROS), что позволяет легко интегрироваться с существующими программными алгоритмами управления роботами для интуитивно понятного дистанционного управления в реальном времени. Этот подход демонстрируется в дополненной реальности с использованием устройства Microsoft Hololens и работает со скоростью до 60 кадров в секунду. Мы исследуем влияние параметров системы, таких как плотность сетки и сложность арматуры, на ключевые показатели производительности реконструкции (то есть скорость, масштабируемость). Ожидается, что платформа с открытым исходным кодом будет служить платформой для будущих исследований и разработок в области дистанционного управления в реальном времени мягкими роботами, работающими в средах, препятствующих прямому наблюдению за роботом.
Мы исследуем влияние параметров системы, таких как плотность сетки и сложность арматуры, на ключевые показатели производительности реконструкции (то есть скорость, масштабируемость). Ожидается, что платформа с открытым исходным кодом будет служить платформой для будущих исследований и разработок в области дистанционного управления в реальном времени мягкими роботами, работающими в средах, препятствующих прямому наблюдению за роботом.
Ключевые слова: Расширенная реальность (XR), робототехника, проприоцепция мягкого робота, реконструкция трехмерной формы, приведение в действие мягкого робота, дополненная реальность, скелетная анимация, дистанционное управление
Мягкие роботы обычно предназначены для работы в крайне непредсказуемых и неструктурированных средах. Хотя их мягкие тела помогают им пассивно приспосабливаться к окружающей среде, выполнение определенных задач в таких средах часто требует помощи оператора, который наблюдает за взаимодействием между мягким роботом и его средой и регулирует входные сигналы для успешного выполнения задания.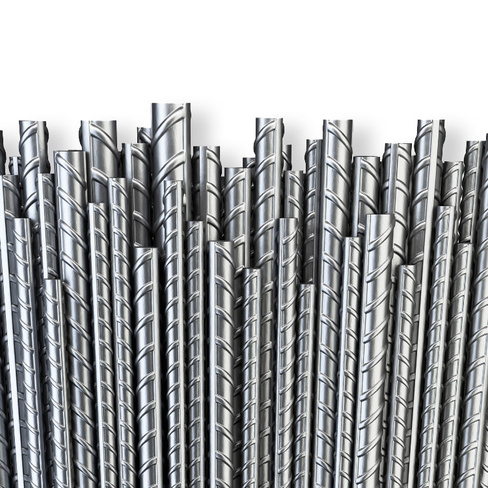 задача. Однако прямое наблюдение за мягким роботом невозможно, когда робот работает под землей (Calderón et al., 2016), под водой (van den Berg et al., 2020), in vivo (Runciman et al., 2019) или в замкнутых пространствах (Takayama et al., 2015; Mazzolai et al., 2019). В таких сценариях оператор должен полагаться на моделирование конфигурации мягкого робота в реальном времени на основе сигналов проприоцептивных датчиков. Хотя для мягких роботов было разработано несколько методов проприоцептивного восприятия и калибровки (Scharff et al., 2018; Van Meerbeek et al., 2018), прогнозирование сложных трехмерных (3D) конфигураций на основе данных этого датчика может быть затруднено. интерпретировать с использованием традиционных методов визуализации. В конечном итоге это приводит к сбоям в выполнении задач или неэффективному выполнению задач. Трехмерное моделирование мягкого робота в реальном времени на иммерсивном дисплее [т. е. расширенная реальность (XR)] значительно поможет оператору в удаленном управлении роботом.
задача. Однако прямое наблюдение за мягким роботом невозможно, когда робот работает под землей (Calderón et al., 2016), под водой (van den Berg et al., 2020), in vivo (Runciman et al., 2019) или в замкнутых пространствах (Takayama et al., 2015; Mazzolai et al., 2019). В таких сценариях оператор должен полагаться на моделирование конфигурации мягкого робота в реальном времени на основе сигналов проприоцептивных датчиков. Хотя для мягких роботов было разработано несколько методов проприоцептивного восприятия и калибровки (Scharff et al., 2018; Van Meerbeek et al., 2018), прогнозирование сложных трехмерных (3D) конфигураций на основе данных этого датчика может быть затруднено. интерпретировать с использованием традиционных методов визуализации. В конечном итоге это приводит к сбоям в выполнении задач или неэффективному выполнению задач. Трехмерное моделирование мягкого робота в реальном времени на иммерсивном дисплее [т. е. расширенная реальность (XR)] значительно поможет оператору в удаленном управлении роботом. Помимо предоставления интуитивно понятного способа наблюдения за конфигурацией мягкого робота в трехмерном пространстве, XR позволяет отображать дополнительную информацию (например, расположение и величину внешних сил, действующих на робота, извлекаемую из дополнительных встроенных датчиков), относящуюся к моделируемому мягкому приводу. Кроме того, среда XR может быть связана со средой управления мягким роботом, так что реальным мягким роботом можно управлять, используя позу виртуального близнеца в качестве управляющего входа. Однако в настоящее время неясно, как можно использовать проприоцептивные сигналы для реконструкции трехмерной формы мягких роботов в расширенной реальности в режиме реального времени. Таким образом, эта работа посвящена следующему исследовательскому вопросу: как можно реконструировать трехмерную форму мягких роботов в режиме реального времени в XR?
Помимо предоставления интуитивно понятного способа наблюдения за конфигурацией мягкого робота в трехмерном пространстве, XR позволяет отображать дополнительную информацию (например, расположение и величину внешних сил, действующих на робота, извлекаемую из дополнительных встроенных датчиков), относящуюся к моделируемому мягкому приводу. Кроме того, среда XR может быть связана со средой управления мягким роботом, так что реальным мягким роботом можно управлять, используя позу виртуального близнеца в качестве управляющего входа. Однако в настоящее время неясно, как можно использовать проприоцептивные сигналы для реконструкции трехмерной формы мягких роботов в расширенной реальности в режиме реального времени. Таким образом, эта работа посвящена следующему исследовательскому вопросу: как можно реконструировать трехмерную форму мягких роботов в режиме реального времени в XR?
В этой работе мы представляем платформу с открытым исходным кодом для трехмерной реконструкции формы мягких роботов в реальном времени в XR (дополненная реальность (AR) и виртуальная реальность (VR)). Эффективность предложенной схемы реконструкции проверена на ранее разработанном приводе мягкого изгиба со встроенными проприоцептивными датчиками (Scharff et al., 2018 и Scharff et al., 2019). Сигналы от встроенных датчиков преобразуются в параметры виртуальной арматуры, которая затем управляет сеткой-представлением мягкого привода через каркас скелетной анимации Unity. Эта функциональность обеспечивается магистралью операционной системы роботов (ROS), которая взаимодействует со всеми компонентами и обеспечивает простую интеграцию с существующими программными платформами управления роботами (McKenzie et al., 2017). Подход демонстрируется в дополненной реальности (AR) () с использованием устройства Microsoft Hololens и работает со скоростью до 60 FPS. Кроме того, мы исследуем влияние параметров системы, таких как плотность сетки и сложность арматуры, на скорость реконструкции и масштабируемость. Параллельное сравнение эталонных кадров и AR-реконструкции показывает, что наша реконструкция точно отражает деформацию мягкого робота во время его взаимодействия с окружающей средой.
Эффективность предложенной схемы реконструкции проверена на ранее разработанном приводе мягкого изгиба со встроенными проприоцептивными датчиками (Scharff et al., 2018 и Scharff et al., 2019). Сигналы от встроенных датчиков преобразуются в параметры виртуальной арматуры, которая затем управляет сеткой-представлением мягкого привода через каркас скелетной анимации Unity. Эта функциональность обеспечивается магистралью операционной системы роботов (ROS), которая взаимодействует со всеми компонентами и обеспечивает простую интеграцию с существующими программными платформами управления роботами (McKenzie et al., 2017). Подход демонстрируется в дополненной реальности (AR) () с использованием устройства Microsoft Hololens и работает со скоростью до 60 FPS. Кроме того, мы исследуем влияние параметров системы, таких как плотность сетки и сложность арматуры, на скорость реконструкции и масштабируемость. Параллельное сравнение эталонных кадров и AR-реконструкции показывает, что наша реконструкция точно отражает деформацию мягкого робота во время его взаимодействия с окружающей средой. Методы, используемые платформой и описанные в этой статье, можно разделить на две четкие фазы: фаза до реального времени, которая состоит из адаптации модели, сцены, датчика и устройства, и фаза реального времени, которая фокусируется на методах, которые запустите, чтобы преобразовать данные датчика в действенные данные анимации костей и каркасов для визуализации AR. Работа организована следующим образом: Раздел 2 охватывает связанную работу в расширенной реальности для робототехники, реконструкции формы мягкого робота и скелетной анимации. Раздел 3 подробно описывает разработанную структуру реконструкции, начиная с подраздела до реального времени (раздел 3.3), за которым следуют методы реального времени (раздел 3.4). Экспериментальные установки, используемые при тестировании этого метода, кратко обсуждаются в разделе 4, а производительность платформы оценивается в разделе 5. Наконец, в разделе 6 обсуждаются выводы и будущая работа.
Методы, используемые платформой и описанные в этой статье, можно разделить на две четкие фазы: фаза до реального времени, которая состоит из адаптации модели, сцены, датчика и устройства, и фаза реального времени, которая фокусируется на методах, которые запустите, чтобы преобразовать данные датчика в действенные данные анимации костей и каркасов для визуализации AR. Работа организована следующим образом: Раздел 2 охватывает связанную работу в расширенной реальности для робототехники, реконструкции формы мягкого робота и скелетной анимации. Раздел 3 подробно описывает разработанную структуру реконструкции, начиная с подраздела до реального времени (раздел 3.3), за которым следуют методы реального времени (раздел 3.4). Экспериментальные установки, используемые при тестировании этого метода, кратко обсуждаются в разделе 4, а производительность платформы оценивается в разделе 5. Наконец, в разделе 6 обсуждаются выводы и будущая работа.
Открыть в отдельном окне
(A) Сенсорный мягкий привод со встроенными датчиками цвета для проприоцепции (B) Цифровой двойник деформированного мягкого привода в режиме реального времени в дополненной реальности на основе измерений проприоцептивных датчиков.
В этой главе мы обсудим связанную с этим работу и рассмотрим различные области, вносящие свой вклад в эту публикацию. Мы начнем с расширенной реальности для робототехники, а затем перейдем к области мягкой робототехники в отношении реконструкции формы. Наконец, мы рассмотрим скелетную анимацию, которая является нашим подходом к 3D-анимации привода мягкого робота.
2.1 Расширенная реальность для робототехники
Различные исследования (Lorenz et al., 2015; Ludwig et al., 2018) показали, что производительность будущих производственных объектов будет пропорциональна способности людей общаться и взаимодействовать с интеллектуальными автоматизированными системами. машины и системы. В связи с растущей сложностью роботов и их рабочих мест (BCG Group, 2015), а также расширением их сотрудничества с людьми возникает потребность в достижениях в области взаимодействия человека с компьютером (HCI), в частности, в нашем случае, в Сотрудничество человека и робота (HRC) (Dianatfar et al. , 2021). Расширенная реальность (XR) с ее подразделами дополненной, смешанной и виртуальной реальности (AR, MR, VR) предлагает ряд мощных инструментов и методов, которые можно использовать для упрощения, расширения и помощи в продуктивном взаимодействии между людьми и роботы. Внедрение XR в производство оказалось возможным, например, в инструкциях по ремонту на основе дополненной реальности (Aschenbrenner et al., 2019).) или отображение дополнительной информации на фабрике (Peake et al., 2016). Хотя по каждой теме, HRC и XR, были проведены значительные исследования, кросс-технологические исследования менее заметны, за очень немногими исключениями (Aschenbrenner et al., 2020). С ростом популярности использования цифровых двойников XR может служить способом взаимодействия с цифровым двойником в контексте его предполагаемой физической среды. Применительно к области HRC, XR может обеспечить связь в реальном времени между роботами и средами XR (например, Microsoft Hololens или Oculus Quest).
, 2021). Расширенная реальность (XR) с ее подразделами дополненной, смешанной и виртуальной реальности (AR, MR, VR) предлагает ряд мощных инструментов и методов, которые можно использовать для упрощения, расширения и помощи в продуктивном взаимодействии между людьми и роботы. Внедрение XR в производство оказалось возможным, например, в инструкциях по ремонту на основе дополненной реальности (Aschenbrenner et al., 2019).) или отображение дополнительной информации на фабрике (Peake et al., 2016). Хотя по каждой теме, HRC и XR, были проведены значительные исследования, кросс-технологические исследования менее заметны, за очень немногими исключениями (Aschenbrenner et al., 2020). С ростом популярности использования цифровых двойников XR может служить способом взаимодействия с цифровым двойником в контексте его предполагаемой физической среды. Применительно к области HRC, XR может обеспечить связь в реальном времени между роботами и средами XR (например, Microsoft Hololens или Oculus Quest). Это повышает удобочитаемость робота и осведомленность пользователя о ситуации. Для таких задач было опубликовано несколько структур (Hussein et al., 2018; Babaians et al., 2018; Aschenbrenner and Rieder, 2021). В этой работе для этого приложения была выбрана и настроена платформа DTStacks (Rieder, 2021) на основе MQTT. Этот выбор протокола MQTT более подробно мотивируется в разделе 4, где делается вывод о том, что это протокол связи, наиболее подходящий для приложений реального времени и обладающий несколькими свойствами, полезными для конкретной функциональности в этой структуре.
Это повышает удобочитаемость робота и осведомленность пользователя о ситуации. Для таких задач было опубликовано несколько структур (Hussein et al., 2018; Babaians et al., 2018; Aschenbrenner and Rieder, 2021). В этой работе для этого приложения была выбрана и настроена платформа DTStacks (Rieder, 2021) на основе MQTT. Этот выбор протокола MQTT более подробно мотивируется в разделе 4, где делается вывод о том, что это протокол связи, наиболее подходящий для приложений реального времени и обладающий несколькими свойствами, полезными для конкретной функциональности в этой структуре.
2.3 Реконструкция формы мягкого робота
В этом подразделе основное внимание уделяется реконструкции формы мягкого робота на основе проприоцептивных сигналов. Проприоцептивное восприятие мягких роботов — это активная область исследований, направленная на разработку датчиков, способных фиксировать практически бесконечные степени свободы, большие деформации и большие деформации материала, не ограничивая деформации мягкого робота. Подробный обзор сенсорных технологий для мягких роботов см. в Wang et al. (2018).
Подробный обзор сенсорных технологий для мягких роботов см. в Wang et al. (2018).
После регистрации деформации мягкого робота необходимо восстановить форму робота на основе этой информации. Это сложная задача, требующая эффективной параметризации формы мягкого робота. Обычно используемые параметры формы для калибровки мягких роботизированных гибочных приводов — это, например, один угол изгиба (Elgeneidy et al., 2018) или кривизна (Zhao et al., 2016). Такие модели чрезмерно упрощают пространство конфигурации робота и, следовательно, не способны точно описать конфигурации робота, которые возникают, когда мягкий привод взаимодействует с окружающей средой. В качестве альтернативы датчики были откалиброваны для прогнозирования ряда предопределенных точек на роботе (Thuruthel et al., 2019).; Шарфф и др., 2019). Однако оператору сложно визуализировать сложную трехмерную форму мягкого робота, основываясь только на наборе трехмерных координатных точек. Представление мягкого робота набором трехмерных кривых, таких как кусочная модель постоянной кривизны (Jones and Walker, 2006; Della Santina et al. , 2020), модель стержня Коссера (Till et al., 2019), или поверхность Безье (Scharff et al., 2021) помогает оператору интерпретировать форму робота, но не может использоваться для визуализации внешнего вида мягкого робота. Внешний вид мягкого робота можно реконструировать в режиме реального времени в виде облака точек (Wang et al., 2020). Однако это представление нельзя напрямую использовать для визуализации в XR. Эта работа посвящена представлению формы мягкого робота с помощью сетки на основе треугольников, чтобы обеспечить совместимость с современными графическими движками. В более широкой области реконструкции формы были применены определенные вычислительные методы для реконструкции сеток из различных источников данных, включая трехмерные облака точек (Янг и др., 2021 г.) или входные двумерные изображения (Колотоурос и др., 2019 г.).; Нгуен и др., 2022)). Наш метод основан на скелетной анимации для визуализации деформированной формы мягкого робота по данным датчика в режиме реального времени.
, 2020), модель стержня Коссера (Till et al., 2019), или поверхность Безье (Scharff et al., 2021) помогает оператору интерпретировать форму робота, но не может использоваться для визуализации внешнего вида мягкого робота. Внешний вид мягкого робота можно реконструировать в режиме реального времени в виде облака точек (Wang et al., 2020). Однако это представление нельзя напрямую использовать для визуализации в XR. Эта работа посвящена представлению формы мягкого робота с помощью сетки на основе треугольников, чтобы обеспечить совместимость с современными графическими движками. В более широкой области реконструкции формы были применены определенные вычислительные методы для реконструкции сеток из различных источников данных, включая трехмерные облака точек (Янг и др., 2021 г.) или входные двумерные изображения (Колотоурос и др., 2019 г.).; Нгуен и др., 2022)). Наш метод основан на скелетной анимации для визуализации деформированной формы мягкого робота по данным датчика в режиме реального времени.
2.4 Скелетная анимация
Скелетная анимация была введена в 1988 году как метод деформации произвольных сеток для создания анимации с помощью иерархического «скелета» — набора узлов кинематического соединения с соответствующими жесткими преобразованиями (Magnenat-Thalmann et al., 1988). ). Скелетная анимация остается основным методом управления сложными трехмерными сетками в режиме реального времени (альтернативные методы для анимации сеток, такие как модели на основе симуляции (Terzopoulos et al., 19).87; Sukumar and Malsch, 2006), хотя и являются точными, но не могут обеспечить решения для анимации в реальном времени, а методы на основе клеток (Nieto and Susín, 2013), которые используют решетчатую структуру для управления вершинами, не могут справиться со сложными деформациями и представляют трудности в иерархической композиции. ).
В алгоритме скиннинга закодированы как перевод между преобразованиями костей скелета, так и преобразования, применяемые к каждой из вершин сетки для осуществления деформации сетки. В литературе существует несколько подходов к метрикам скиннинга для деформации сеток (Rumman and Fratarcangeli, 2016): либо с помощью упрощенного механического моделирования на основе физики (Nealen et al., 2006; Sorkine and Alexa, 2007), либо с помощью методов, основанных на примерах ( Mukai, 2018), таких как сопоставление движения, в котором используются интерполированные примеры данных из реального мира или созданные художниками для деформации сетки. Наконец, у нас есть метрики, основанные на геометрии, которые напрямую используют преобразования скелета для вычисления окончательных преобразований вершин. Это стандартные методы создания скинов для интерактивных приложений из-за их относительной простоты и эффективности (Rumman and Fratarcangeli, 2016).
В литературе существует несколько подходов к метрикам скиннинга для деформации сеток (Rumman and Fratarcangeli, 2016): либо с помощью упрощенного механического моделирования на основе физики (Nealen et al., 2006; Sorkine and Alexa, 2007), либо с помощью методов, основанных на примерах ( Mukai, 2018), таких как сопоставление движения, в котором используются интерполированные примеры данных из реального мира или созданные художниками для деформации сетки. Наконец, у нас есть метрики, основанные на геометрии, которые напрямую используют преобразования скелета для вычисления окончательных преобразований вершин. Это стандартные методы создания скинов для интерактивных приложений из-за их относительной простоты и эффективности (Rumman and Fratarcangeli, 2016).
В этом исследовательском проекте используется гибридный подход, при котором использование этих стандартных конвейеров анимации позволяет деформировать сетку в реальном времени. Тем не менее, анимация управляется точной оценкой конфигурации мягкого привода, поступающей от его проприоцептивных датчиков. В результате наш подход эффективно сочетает точность и эффективность.
В результате наш подход эффективно сочетает точность и эффективность.
Этот раздел начинается с общего обзора всего конвейера, за которым следуют подразделы, в которых более подробно рассматривается сенсорный мягкий привод, этапы предварительной обработки и, наконец, обработка в реальном времени.
3.1 Обзор
показывает общий обзор среды реального времени. Он начинается в верхней левой области (выделено синим цветом), где фактический физический привод деформируется из-за перепада давления воздуха в сильфоне. Датчики света внутри этих сильфонов выводят данные RGBC (красный, зеленый, синий, чистый), которые отправляются через USB на компьютер ROS на базе Linux (в данном случае Intel NUC). В среде ROS (выделено зеленым цветом) эти необработанные данные датчиков предварительно обрабатываются и передаются через ROS на следующий узел, где они служат входными данными для первой нейронной сети с прямой связью (FFNN), которая преобразует эти данные в координаты маркера, процесс, описанный в Scharff et al. (2019).
(2019).
Открыть в отдельном окне
Схематический обзор структуры системы, которая преобразует измерения сенсорного мягкого привода (A) в трехмерную визуализацию в реальном времени с помощью голографических дисплеев. (B) обозначает среду ROS и программные узлы в ней, а (C) указывает узлы обработки в реальном времени платформы.
Следующие модули берут эти координаты маркеров и в конечном итоге преобразуют их в данные анимации «кости», используемые системой Unity. Кости соединяли два сустава в этих «скелетах». Они связаны с преобразованиями вершин сетки, что позволяет косвенно управлять сеткой через набор совместных преобразований скелета, а не вершин по отдельности. Этот процесс создания и слияния этого скелета называется риггингом, где каждая кость имеет жесткое трехмерное положение, вращение и масштаб, и влияет на часть меша, с которым она связана. В нашем методе этот процесс состоит из трех основных этапов: во-первых, на маркеры накладывается сплайн-кривая, выступающая в роли «основного скелета» текущей деформации актуатора; за которым следует этап интерполяции, определяющий положение и ориентацию анимационных «костей» в модели цифрового двойника привода. Используя информацию о производной более высокого порядка от интерполированной сплайновой функции, последний шаг упаковывает эти ориентации в единую структуру, так что полная деформация привода кодируется таким образом, который может передаваться и декодироваться сценарием Unity. Первоначально эти шаги выполнялись явно, но позже эти шаги были целостно закодированы с помощью второго FFNN (фиолетового цвета). Таким образом, конвейер основан на следующих основных этапах: установка для настройки анимированной 3D-модели, сбор и обработка данных оптического датчика, реконструкция анимации из данных FFNN в набор конфигураций костей для скелетной анимации и рендеринг этого в реальном времени. данные через интерфейс Unity.
Используя информацию о производной более высокого порядка от интерполированной сплайновой функции, последний шаг упаковывает эти ориентации в единую структуру, так что полная деформация привода кодируется таким образом, который может передаваться и декодироваться сценарием Unity. Первоначально эти шаги выполнялись явно, но позже эти шаги были целостно закодированы с помощью второго FFNN (фиолетового цвета). Таким образом, конвейер основан на следующих основных этапах: установка для настройки анимированной 3D-модели, сбор и обработка данных оптического датчика, реконструкция анимации из данных FFNN в набор конфигураций костей для скелетной анимации и рендеринг этого в реальном времени. данные через интерфейс Unity.
Эта структура данных пересылается с помощью транспорта телеметрии очереди сообщений (MQTT), который соединяет подсистемы ROS со средой Unity на HoloLens 2 через (локальный) брокер MQTT. В Unity кости 3D-модели со скинами и ригами обновляются с каждым новым полученным сообщением данных, что позволяет напрямую визуализировать модель через голографические дисплеи . Номинально это было сделано со скоростью до 60 FPS. Завершая этот обзор, фреймворк имеет следующие четыре требования для реконструкции мягких роботов:
Номинально это было сделано со скоростью до 60 FPS. Завершая этот обзор, фреймворк имеет следующие четыре требования для реконструкции мягких роботов:
1) У нас есть мягкий привод со встроенной (или внешней) обратной связью в режиме реального времени, который может передавать данные через последовательные порты на компьютер ROS (раздел 3.2).
2) У нас есть виртуальный двойник такого привода, т. е. 3D-модель, которую можно настроить для имитации степени свободы привода (раздел 3.3).
3) У нас есть некоторый метод встраивания сопоставления между этими необработанными данными привода и морфологией самого привода (в демонстрации этой работы мы использовали результаты предыдущей работы (Scharff et al., 2018), где это выполняется с помощью метода на основе маркеров, датчиков цвета и FFNN).
4) У нас есть способ преобразования этих данных морфологии в данные оснастки/скининга сетки (подраздел 3.4.1).
3.
 2 Мягкий актуатор с сенсорным управлением
2 Мягкий актуатор с сенсорным управлением
Структура реконструкции мягких роботов в режиме реального времени в XR применима к широкому спектру сенсорных мягких роботов. В этой работе мы демонстрируем структуру сенсорного мягкого пневматического изгибающего привода, показанного на рис. Принцип восприятия основан на захвате напечатанных на 3D-принтере цветных узоров внутри воздушной камеры привода () с помощью небольшого количества цветовых датчиков, встроенных в нерастяжимый слой привода. В процессе калибровки на основе машинного обучения изменение цвета, наблюдаемое датчиками цвета при деформации, использовалось для прогнозирования относительных 2D-координат шести маркеров, размещенных на мягком приводе. Эти параметры примитивной формы составляют основу для анимации 3D-модели привода с оснасткой. Для получения дополнительной информации о принципе измерения и процессе калибровки см. Scharff et al. (2018 г.); Шарфф и др. (2019). В этой работе мы используем набор данных калибровки и оценки открытого доступа (Scharff, 2021), созданный Scharff et al. (2019). Набор калибровочных данных состоит из измерений RGBC четырех датчиков цвета и соответствующих координат двумерных маркеров для 1000 различных конфигураций привода. Набор оценочных данных состоит из видео, где привод взаимодействует с различными объектами в сочетании с соответствующими измерениями RGBC.
(2019). Набор калибровочных данных состоит из измерений RGBC четырех датчиков цвета и соответствующих координат двумерных маркеров для 1000 различных конфигураций привода. Набор оценочных данных состоит из видео, где привод взаимодействует с различными объектами в сочетании с соответствующими измерениями RGBC.
Открыть в отдельном окне
(A) Сенсорный Мягкий привод со встроенными четырьмя датчиками цвета и шестью красными маркерами на нерастяжимом слое. (B) Иллюстрация, демонстрирующая цветовую схему преобразования сигнала внутри воздушной камеры привода.
3.3 Этапы предварительной обработки
Прежде чем углубляться в среду реального времени, мы должны начать с краткого обсуждения шагов предварительной обработки, которые позволили создать такой конвейер.
Чтобы получить ранее упомянутого цифрового двойника привода, мы должны начать с 3D-сетки. Это было достигнуто с помощью набора инструментов Blender (Сообщество Blender, 2018). Перед этапами анимации модель цифрового двойника необходимо упростить, так как модель, изготовленная в САПР, содержит слишком много деталей. Как упоминалось ранее, производственная модель передискретизируется в блендере. Эта повторная выборка обеспечивает сетку, которая сгруппирована на поверхности с различной плотностью. Чтобы оптимизировать плотность сетки, применяются последовательные раунды алгоритмов прореживания и повторной триангуляции, пока мы не закончим топологию, которая максимизирует точность деталей с минимальным количеством вершин (как можно видеть на , где () представляют конфигурации, которые лучше всего кодируют эти желаемые характеристики).
Перед этапами анимации модель цифрового двойника необходимо упростить, так как модель, изготовленная в САПР, содержит слишком много деталей. Как упоминалось ранее, производственная модель передискретизируется в блендере. Эта повторная выборка обеспечивает сетку, которая сгруппирована на поверхности с различной плотностью. Чтобы оптимизировать плотность сетки, применяются последовательные раунды алгоритмов прореживания и повторной триангуляции, пока мы не закончим топологию, которая максимизирует точность деталей с минимальным количеством вершин (как можно видеть на , где () представляют конфигурации, которые лучше всего кодируют эти желаемые характеристики).
Открыть в отдельном окне
Различные Визуализации выборки исходной модели САПР с уменьшением плотности сетки на строку. Исходная CAD-модель была экспортирована из SOLIDWORKS, и в Blender она была сэмплирована с различной плотностью [ (A) 847 k verts, 1,7 M tris; (B) 82 тыс. вертикалей, 164 тыс. треугольников; (C) 13 тыс. верт, 26 тыс. трис; и (D) 3,2 тыс. вершин, 6 тыс. трис], после чего были применены алгоритмы прореживания/пересоздания сетки, которые упростили топологию сетки.
треугольников; (C) 13 тыс. верт, 26 тыс. трис; и (D) 3,2 тыс. вершин, 6 тыс. трис], после чего были применены алгоритмы прореживания/пересоздания сетки, которые упростили топологию сетки.
Мы используем стандартный для анимации метод скиннинга Linear Blend Skinning, который представляет собой прямой геометрический метод (Lewis et al., 2000). Чтобы анимировать и деформировать набор костей скелета из одной «позы» в другую, где положение каждой вершины сетки будет зависеть от следующего основного уравнения: pose всегда определяется относительно скелета в его начальном положении, в нашем случае привода, когда все сильфоны не задействованы. Данная поза сдвинет все вершины сетки из этой начальной позиции позы.
(врефи)
до против
и
. В этой математической модели дано дерево суставов, составляющих скелет, и кости, соединяющие два сустава и управляющие ими, каждая вершина
против
и
Положение по отношению к определенному времени ( t ) будет зависеть от линейной комбинации нескольких примитивов деформации. А именно,
А именно,
Bj(t)∈R3×4
, относительное преобразование кости j кодирует преобразование связанного сустава j , относительно эталонной позы. с
и
— набор грузов для снятия шкуры. Этот набор существует, потому что на одну вершину могут влиять несколько костей. Сумма этого набора на вершину по всем связанным с ней костям унитарна.
(∑j=0n−1wij=1)
. Конкретное разделение этого набора выполняется с помощью алгоритма скиннинга. В нашем случае влияние конкретной кости на вершину закодировано на этапе рисования веса ().
Открыть в отдельном окне
(A) Упрощенная трехмерная модель привода вместе с (B) , показывающая градиент окраски веса для третьей кости [от красного (максимальное влияние вершины) до темно-синего — нулевое влияние] для одного сильфона и соответствующей ему кости . Этот градиент является визуальным представлением весов вершин, установленных для этой сетки для третьей кости (Scharff et al. (2018))
(2018))
. твердые 3D-печатные детали в конце. Поскольку основным степенем свободы этого «пальцевого» привода является сжатие/расширение сильфона под действием давления воздуха, и одновременное расширение сильфона, скелет оснастки прост, кость может контролировать положение каждого сегмента сильфона. , при этом оба конца привода соединены с секцией мягкого привода через фиксированные связи. Каждая кость имеет фиксированную связь друг с другом, так как они идеально центрированы в каждом сегменте сильфона. Окончательное положение кости параметризуется информацией о координатах положения маркера, которую мы получаем из конвейера обработки анимации из FFNN.
В конструкции актуатора подход к скиннингу был простым, с использованием линейного градиента, применяемого к костям, так что каждая кость влияет на соответствующий сильфон, за исключением базовой кости, которая прикреплена к основанию актуатора.
3.4 Обработка в режиме реального времени
3.4.1 Обработка анимации на основе данных оптического датчика
нерастяжимый слой привода. Каждый сегмент сильфона привода оснащен датчиком цвета, встроенным в нерастяжимый слой привода. Первая FFNN принимает данные датчика цвета RGBC в качестве входных данных и выводит координаты шести маркеров (X, Y, в миллиметрах). Он состоит из двух слоев со скрытым слоем (с сигмовидной передаточной функцией) с десятью нейронами, с выходным слоем, использующим линейную передаточную функцию. 16 необработанных входных данных датчика затем становятся 12 выходными координатами.
Каждый сегмент сильфона привода оснащен датчиком цвета, встроенным в нерастяжимый слой привода. Первая FFNN принимает данные датчика цвета RGBC в качестве входных данных и выводит координаты шести маркеров (X, Y, в миллиметрах). Он состоит из двух слоев со скрытым слоем (с сигмовидной передаточной функцией) с десятью нейронами, с выходным слоем, использующим линейную передаточную функцию. 16 необработанных входных данных датчика затем становятся 12 выходными координатами.
Окончательная анимационная поза скелета требует 3D-положения (относительно начала координат привода, т. е. маркера основания или присоединяемой части) и поворота каждой кости, поэтому для каждой позы скелета требуется 30 входных данных. Эта структура позы является разреженной из-за нерастяжимого материала, сжимающего мягкие сильфоны (например, базовый слой позвоночника, в который помещаются маркеры). Трехмерное положение сильфона можно получить с помощью координаты его ограничительного маркера (X, Y) относительно начала координат и угловой ориентации сильфона относительно его «покоя» (), где отклонение составляет 0 °, как истинность маркеров. )
)
, учитывая, что векторы являются базисными (| против | = 1).
В качестве альтернативы эти преобразования могут быть закодированы от начала до конца. После проверки предыдущего подхода к визуализации привода была разработана новая FFNN с той же структурой, что и первоначальная, за исключением выходного слоя, который имеет 14 узлов (параметры фиксированной позы, такие как исходная точка, исключены). В то время как полная поза скелета принимает 30 параметров, ограничения глубины резкости, присущие дизайну прототипа, позволяют зафиксировать эти параметры. Эта новая сеть была обучена с использованием алгоритма байесовской регуляризации с использованием стандартного разделения сквозных выборок (70% для обучения, 15% для проверочного набора, 15% для тестирования).
3.4.2 Рендеринг в дополненной реальности
На последнем этапе этой структуры данные скелетной анимации отправляются по локальной сети (локальному) брокеру MQTT и направляются в Hololens 2, на котором работает среда моделирования Unity в реальном времени. . Он состоит из сцены со сфальсифицированной 3D-моделью, в которой сценарий C# обновляет параметры каждой кости в соответствии с новым сообщением от брокера, чтобы составить окончательную скелетную позу привода. Чтобы предотвратить любые визуальные артефакты и сгладить временные сбои, конечные позы между последующими кадрами линейно интерполируются (как свободный параметр визуализации). Затем Hololens 2 визуализирует последние положения и повороты костей (3D-движение и вращение) для визуализации модели в режиме реального времени.
. Он состоит из сцены со сфальсифицированной 3D-моделью, в которой сценарий C# обновляет параметры каждой кости в соответствии с новым сообщением от брокера, чтобы составить окончательную скелетную позу привода. Чтобы предотвратить любые визуальные артефакты и сгладить временные сбои, конечные позы между последующими кадрами линейно интерполируются (как свободный параметр визуализации). Затем Hololens 2 визуализирует последние положения и повороты костей (3D-движение и вращение) для визуализации модели в режиме реального времени.
Как упоминалось ранее, в этой технике визуализации в реальном времени используется несколько инструментов. Их можно разделить примерно на два этапа: во-первых, взаимодействие с приводом, сбор данных и преобразование их в анимационную позу, а во-вторых, анимация виртуального двойника сфальсифицированного привода в настройке сцены AR. Мы использовали компьютер Intel NUC, который использовал операционную систему роботов (ROS) для сбора данных с датчика (через последовательный порт) в узле и передачи их на узел ROS анимации, который реализовал FFNN и создал данные позы анимации. . Для повторного сравнительного анализа альтернативных методов при аналогичных ограничениях необработанные данные об исполнительных механизмах предварительно собирались при установленных ограничениях в базу данных, которая затем передавалась непосредственно в остальную часть фреймворка. В системе был настроен MQTT-Bridge GROOVE-X (2020), который с помощью роутера отправлял анимационные позы через локальную сеть, через a (mosquitto) MQTT Broker, в HoloLens 2. HoloLens 2 получала сообщения MQTT через настроенную версию платформы MQTT «DTStacks» (Rieder, 2021). Этот протокол MQTT возник в области IoT (Интернет вещей). Он был выбран из-за того, что это стандартный отраслевой протокол с широкой поддержкой устройств/платформ (от веб-хостов до встроенных устройств), что обеспечивает максимальную гибкость при подключении частей нашей инфраструктуры и для будущей работы с минимальными усилиями пользователя. т. е. есть легкодоступные плагины, обрабатывающие связь во всех различных модулях фреймворка, не требующие дополнительной работы для накладных расходов на соединение.
. Для повторного сравнительного анализа альтернативных методов при аналогичных ограничениях необработанные данные об исполнительных механизмах предварительно собирались при установленных ограничениях в базу данных, которая затем передавалась непосредственно в остальную часть фреймворка. В системе был настроен MQTT-Bridge GROOVE-X (2020), который с помощью роутера отправлял анимационные позы через локальную сеть, через a (mosquitto) MQTT Broker, в HoloLens 2. HoloLens 2 получала сообщения MQTT через настроенную версию платформы MQTT «DTStacks» (Rieder, 2021). Этот протокол MQTT возник в области IoT (Интернет вещей). Он был выбран из-за того, что это стандартный отраслевой протокол с широкой поддержкой устройств/платформ (от веб-хостов до встроенных устройств), что обеспечивает максимальную гибкость при подключении частей нашей инфраструктуры и для будущей работы с минимальными усилиями пользователя. т. е. есть легкодоступные плагины, обрабатывающие связь во всех различных модулях фреймворка, не требующие дополнительной работы для накладных расходов на соединение. Его реализация проста, и это независимый от данных, легкий и эффективный способ беспроводной передачи данных. MQTT также оптимизирован для низкой задержки, поэтому он больше подходит для приложений реального времени, кроме того, он имеет открытый исходный код, легкий для использования в игровом движке для мобильного устройства и может использовать глобальные адреса. Модель привода размещалась в фиксированном месте и управлялась на основе последней полученной структуры данных, при этом каждое полученное сообщение содержало всю необходимую информацию для всех соединений.
Его реализация проста, и это независимый от данных, легкий и эффективный способ беспроводной передачи данных. MQTT также оптимизирован для низкой задержки, поэтому он больше подходит для приложений реального времени, кроме того, он имеет открытый исходный код, легкий для использования в игровом движке для мобильного устройства и может использовать глобальные адреса. Модель привода размещалась в фиксированном месте и управлялась на основе последней полученной структуры данных, при этом каждое полученное сообщение содержало всю необходимую информацию для всех соединений.
Для подготовки сетей и запуска тестов набор данных был получен с помощью установки, в которой активный привод приводился в действие с помощью случайного давления и положения препятствия. В этот момент как состояние датчика, так и наземная деформация были зафиксированы камерой, при этом наземная достоверность была получена путем извлечения положения маркера из калиброванных изображений. Более подробную информацию об условиях построения этого набора данных можно найти в Scharff et al. (2019).
(2019).
Платформа с открытым исходным кодом для трехмерной реконструкции формы мягких роботов в режиме XR в реальном времени доступна в репозитории исследовательских данных 4TU (Borges and Rieder, 2021). Платформа включает в себя код ROS для взаимодействия с приводом, а также сценарии Unity, которые позволяют визуализировать данные живой анимации в AR. Код сопровождается обширной документацией, которая позволяет другим легко настраивать фреймворк. Чтобы другие могли сравнить результаты будущих реализаций предложенной схемы, изображения/видеоданные и соответствующие значения датчиков, которые использовались для калибровки мягкого привода и оценки схемы, также были доступны в Интернете (Scharff, 2021). Платформа может достигать пропускной способности 66 кадров в секунду. Устройство Hololens 2 AR требует, чтобы разработчики приложений поддерживали 60 кадров в секунду, что дает фреймворку бюджет задержки 16 мс для отправки новой позы в Unity. Демонстрация представляет собой сцену с низким уровнем сложности, поскольку к виртуальному двойнику мягкого робота не применяются текстуры с примерно 100 000 вершин. Таким образом, на стороне приложения единственным узким местом в производительности остаются фильтры постобработки (такие как тени/освещение). Это обеспечивает единый этап для тестирования производительности самой структуры.
Таким образом, на стороне приложения единственным узким местом в производительности остаются фильтры постобработки (такие как тени/освещение). Это обеспечивает единый этап для тестирования производительности самой структуры.
5.1 Оценка и сравнение
Начиная с Linear Blend Skinning (LBS), количество необходимых операций связано с двумя основными факторами: плотностью сетки и сложностью кости.
Есть два основных узких места в производительности анимации в этой настройке 1): количество костей данного скелета, так как вершина может использовать данные матрицы преобразования нескольких костей скелета (через набор параметров веса) и количество вершин сетки, которые необходимо преобразовать (это связано с тем, что процесс рендеринга зависит от вершин сетки). Как линейная операция (), сохранение простой настройки сцены является прямым. Уменьшая плотность сетки с помощью алгоритмов децимации и ограничивая связанные пары костей определенными вершинами (в идеале, одной), можно ограничить количество обновлений параметров для новой позы сетки (это не всегда возможно, так как сложные деформации не могут быть обработаны). точно воспроизводится с одним влиянием кости на вершину). Из-за процесса 3D-печати, связанного с производством привода, модель CAD уже была доступна. Визуализация не требует плотности вершин, необходимой для изготовления (линейно коррелирует с производительностью анимации), и, поскольку в процессе скиннинга необходима только сетка внешней поверхности, эта необработанная преобразованная сетка из модели CAD была упрощена с использованием методов прореживания сетки (Gotsman et al. ., 2002), а именно кластеризация вершин вокруг внешней 3D-поверхности и прореживание исходной сетки с примерно 1 М вершин до примерно 100 000. Как видно на , поведение мягкого робота не может быть воспроизведено с сеткой с самой низкой точностью, поскольку перекрытие между сильфонами делает невозможным каркас кости-вершины, поскольку переходы сильфона требуют, чтобы вершина находилась под влиянием соседних костей, как хорошо, хотя эти вершины остаются в меньшинстве полной сетки. Хотя можно было бы применить дальнейшие оптимизации, эти преобразования уже позволили сократить количество необходимых операций в 12 раз, при этом эти параметры настраиваются для конкретной настройки сцены/актуатора, будь то в сторону большей точности или большей производительности.
точно воспроизводится с одним влиянием кости на вершину). Из-за процесса 3D-печати, связанного с производством привода, модель CAD уже была доступна. Визуализация не требует плотности вершин, необходимой для изготовления (линейно коррелирует с производительностью анимации), и, поскольку в процессе скиннинга необходима только сетка внешней поверхности, эта необработанная преобразованная сетка из модели CAD была упрощена с использованием методов прореживания сетки (Gotsman et al. ., 2002), а именно кластеризация вершин вокруг внешней 3D-поверхности и прореживание исходной сетки с примерно 1 М вершин до примерно 100 000. Как видно на , поведение мягкого робота не может быть воспроизведено с сеткой с самой низкой точностью, поскольку перекрытие между сильфонами делает невозможным каркас кости-вершины, поскольку переходы сильфона требуют, чтобы вершина находилась под влиянием соседних костей, как хорошо, хотя эти вершины остаются в меньшинстве полной сетки. Хотя можно было бы применить дальнейшие оптимизации, эти преобразования уже позволили сократить количество необходимых операций в 12 раз, при этом эти параметры настраиваются для конкретной настройки сцены/актуатора, будь то в сторону большей точности или большей производительности.
Открыть в отдельном окне
Операции с плавающей запятой для каждой позы, необходимые для скелетного меша с использованием конвейера анимации блендера по умолчанию, относительно сложности каркаса (количество связанных пар костей в одной вершине), с выделенным сравнением между мешем требуется 100 тыс. вершин по сравнению с одной с 1 млн вершин, при предполагаемом отраслевом стандарте не более четырех связанных пар костей на вершину.
Для конвейера анимации наибольшая задержка возникает на этапе обработки анимации. Общая структура занимает примерно (5,18 ± 1,42) мс, чтобы отправить новую информацию о позе в Unity. Для прямого прохода нейронной сети требуется (0,68 ± 0,09) мс, при этом секция сплайна и костной реконструкции занимает (3,30 ± 1,05) мс. При замене этих двух шагов целостной FFNN весь этот этап занимает (2,69 ± 0,10) мс; однако такая структура имеет недостатки с точки зрения надежности. Структурирование выходных данных и отправка их через соединение MQTT занимает (1,19 ± 0,31) мс, при этом скрипт анимации на стороне Unity занимает больше времени.
9,62±0,38 мс
, что обеспечивает наилучшую системную частоту кадров около 65,88 кадров в секунду .
1
.
Руководство Unity по производительности Hololens устанавливает определенные ограничения в сложности сцены для поддержания частоты кадров в таблице. LBS — это линейный алгоритм, означающий, что производительность анимации данного скелета линейно коррелирует между количеством его вершин, при этом коэффициент влияния множителя зависит от сложности каркаса (и, следовательно, кости). Несмотря на то, что матрица влияния является разреженной (из-за отраслевого стандарта не более четырех костей, соединенных с одной вершиной), точные факторы будут зависеть от процента вершин в скин-сетке, на которые влияет одна или несколько костей. В нашем случае простой актуатор имеет несколько зон множественного воздействия (в основном сильфонные зазоры). Рендеринг нескольких из этих приводов в сцене не ограничивается секцией конвейера анимации платформы — модульная природа ROS просто означает, что узел анимации может быть создан для каждого привода, эффективно распараллелив их, хотя это может добавить накладные расходы ввода-вывода, в зависимости от доступные порты ввода/вывода. Однако в среде hololens это нелегко адаптировать, линейная сложность анимации в отношении количества вершин означает, что сцена с десятью анимированными цифровыми двойниками будет иметь примерно 10-кратное снижение производительности. Тем не менее, это можно исправить, используя сетки с более низкой точностью (т. перед).
Однако в среде hololens это нелегко адаптировать, линейная сложность анимации в отношении количества вершин означает, что сцена с десятью анимированными цифровыми двойниками будет иметь примерно 10-кратное снижение производительности. Тем не менее, это можно исправить, используя сетки с более низкой точностью (т. перед).
Наконец, мы можем сравнить окончательную визуализацию с ожидаемыми положениями маркеров и изображениями наземной достоверности (). Помимо точности базовой модели FFNN, которая более подробно оценивалась в предыдущей работе (Scharff et al., 2018), мы можем видеть, что по мере того, как деформации становятся более экстремальными, реконструкция становится менее точной. Это связано с несколькими причинами, среди которых тот факт, что полностью «нерастяжимый» слой является упрощением, разрыв, существующий между скиннинговой «моделью» актуатора и его реальными деформационными свойствами, и врожденная ошибка FFNN ( 0,0094 MSE между ожидаемыми результатами и выходными данными NN). Основные преимущества этих сетей заключаются в их фиксированной производительности и хорошей аппроксимации. В нашем случае простая FFNN всего с 338 тыс. параметров может воспроизвести фазу оценки кости по необработанным данным датчика с потерей надежности, но сделать это предсказуемо.
Основные преимущества этих сетей заключаются в их фиксированной производительности и хорошей аппроксимации. В нашем случае простая FFNN всего с 338 тыс. параметров может воспроизвести фазу оценки кости по необработанным данным датчика с потерей надежности, но сделать это предсказуемо.
Открыть в отдельном окне
Демонстрация предлагаемой основы для привода с мягким изгибом. В первом столбце показан мягкий привод при различных давлениях срабатывания и внешних силах. Во втором столбце показаны координаты маркера, предсказанные на основе измерений датчика, а также сплайновые и костные векторы, рассчитанные на основе этих координат. В третьем столбце показан виртуальный двойник мягкого актуатора в среде Unity.
Видео моделирования, синхронизированное с кадрами реального мягкого привода, доступно вместе со статьей.
Основной исследовательский вклад этой работы заключается в разработке масштабируемого и эффективного метода реконструкции формы мягкого робота в режиме реального времени в трехмерной среде. Предлагаемый метод использует преимущества стандартных методов реального времени, используемых в анимации и компьютерной графике, что позволяет использовать современные графические инструменты.
Предлагаемый метод использует преимущества стандартных методов реального времени, используемых в анимации и компьютерной графике, что позволяет использовать современные графические инструменты.
Ожидается, что платформа с открытым исходным кодом будет служить платформой для будущих исследований и разработок в области дистанционного управления в реальном времени мягкими роботами в средах, которые препятствуют прямому наблюдению за роботом. Более того, мы считаем, что эта структура может стать ценным инструментом для других исследователей для изучения мягкого робота в предполагаемой среде, чтобы определить возможные области для улучшения.
В этой работе каркас демонстрируется на мягком приводе, который изгибается только в плоскости. Однако этот подход можно легко распространить на трехмерно деформирующих мягких роботов, подгоняя трехмерный сплайн к нескольким точкам робота. Однако этот подход требует, чтобы форма мягкого робота могла быть аппроксимирована арматурой. Это относится к наиболее часто используемым конструкциям мягких роботов, таких как мягкие континуальные руки, приводы с мягким изгибом, искусственные мышцы и мягкие роботы, предназначенные для перистальтической локомоции. Подход применим к любому типу проприоцептивных сенсоров. Тем не менее, датчики должны быть откалиброваны по данным наземной достоверности, которые можно легко преобразовать в арматуру (например, используя стратегически размещенные маркеры, такие как в этой работе).
Подход применим к любому типу проприоцептивных сенсоров. Тем не менее, датчики должны быть откалиброваны по данным наземной достоверности, которые можно легко преобразовать в арматуру (например, используя стратегически размещенные маркеры, такие как в этой работе).
Мы считаем, что для минимальных накладных расходов пользователя методы на основе маркеров/геометрии обеспечивают хороший баланс этих соображений, поскольку продемонстрировано, что построение на основе фиксированных маркеров дает хорошие результаты для прогнозов морфологии актуатора на основе модели FFNN (Scharff et al., 2018) . Этот метод, основанный на маркерах/геометрии, может быть более просто параметризован в соответствии со стандартом Bone/Armature, как показано в этой работе, с производительностью и высокой пропускной способностью, необходимыми для работы в режиме реального времени (как оценивалось в разделе 5.1). Использование такого подхода для других мягких роботов заключается в основном в переобучении модели FFNN и настройке метода оценки костей в соответствии с новым цифровым двойником, а также в настройке XR-сцены в соответствии с желаемым сценарием.
Будущая работа будет сосредоточена на отображении дополнительной информации об окружающей среде или состоянии робота в моделировании (например, место контакта или распределение нагрузки). Кроме того, будущая работа может быть сосредоточена на интеграции не только моделирования, но и управления мягким роботом через ROS (пример управления мягким роботом через ROS продемонстрирован в McKenzie et al. (2017)). Эта интеграция может обеспечить взаимодействие между мягким роботом и его виртуальным двойником. Например, в то время как мягкий робот в настоящее время управляет реконструкцией, им также можно управлять, используя позу виртуального близнеца в качестве управляющего входа.
Наконец, фреймворк можно дополнительно оптимизировать, автоматизировав этапы создания скинов и оснастки, уменьшив визуальные сбои, возникающие на этапах децимации меша, и упростив накладные расходы фреймворка, чтобы обеспечить более сложную и реалистичную визуализацию (сложное освещение, тени, мультиматериалы). мягкие роботы).
мягкие роботы).
1 Unity содержит определенную задержку. Данные костей обновляются только со следующим кадром. То есть у нас есть задержка рендеринга до 16 мс, однако этот «сдвиг» не заметен для пользователя.
Наборы данных, сгенерированные и проанализированные для этого исследования, можно найти в репозитории исследовательских данных 4TU. Доступ к структуре для трехмерной реконструкции формы мягких роботов в XR (Borges and Rieder, 2021) можно получить по следующей ссылке: https://data.4tu.nl/articles/software/Soft_Gripper_AR_Framework/16943254. Доступ к изображениям/видеоданным и соответствующим значениям датчиков, которые использовались для калибровки мягкого привода и оценки структуры Scharff (2021), можно получить по следующей ссылке: https://data.4tu.nl/articles/dataset/Sensorized_Soft_Actuator_Datasets. /16943239.
EB — Концептуализация, методология, программное обеспечение, проверка, формальный анализ, исследование, обработка данных, написание — первоначальный проект, визуализация. JR — Программное обеспечение, проверка, исследование, обработка данных, написание — обзор и редактирование. DA — Написание — обзор и редактирование, контроль, ресурсы. RS — Концептуализация, методология, написание — первоначальный проект, авторский надзор.
JR — Программное обеспечение, проверка, исследование, обработка данных, написание — обзор и редактирование. DA — Написание — обзор и редактирование, контроль, ресурсы. RS — Концептуализация, методология, написание — первоначальный проект, авторский надзор.
В этом проекте используются ресурсы проекта Mirrorlabs, финансируемого EIT Manufacturing.
Авторы заявляют, что исследование проводилось при отсутствии каких-либо коммерческих или финансовых отношений, которые могли бы быть истолкованы как потенциальный конфликт интересов.
Все претензии, изложенные в этой статье, принадлежат исключительно авторам и не обязательно представляют претензии их дочерних организаций или издателя, редакторов и рецензентов. Любой продукт, который может быть оценен в этой статье, или претензии, которые могут быть сделаны его производителем, не гарантируются и не поддерживаются издателем.
Дополнительный материал к этой статье можно найти в Интернете по адресу: https://www.frontiersin. org/articles/10.3389/frobt.2022.810328/full#supplementary-material.
org/articles/10.3389/frobt.2022.810328/full#supplementary-material.
Дополнительное видео S1
Параллельное сравнение сенсорного мягкого привода и его виртуального двойника в дополненной реальности.
Щелкните здесь, чтобы просмотреть файл с дополнительными данными. (26M, MP4)
Щелкните здесь, чтобы просмотреть файл с дополнительными данными. (40M, mp4)
- Ашенбреннер Д., Лойтерт Ф., Ченчен А., Верлинден Дж., Шиллинг К., Латощик М. и др. (2019). Сравнение человеческого фактора для дополненной реальности, поддерживаемой однопользовательскими и совместными операциями по ремонту промышленных роботов. Фронт. Робот. ИИ
6, 37. 10,3389/frobt.2019.00037
[Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] - Ашенбреннер Д., Ридер Дж. (2021). [Набор данных]. Основа для публикации: Mirrorlabs – Создание аналогичной среды обучения для студентов по всей Европе для совместного производства человека и робота. 2020 21-й международный симпозиум IEEE на тему «Мир беспроводных, мобильных и мультимедийных сетей» (WoWMoM).
 10.4121/14186807.v1
10.4121/14186807.v1
[CrossRef] [Академия Google] - Ашенбреннер Д., Ридер Дж. С. И., ван Тол Д., ван Дам Дж., Русак З., Блех Дж. О. и др. (2020). «Mirrorlabs — Создание доступных цифровых близнецов роботизированной производственной среды со смешанной реальностью», Международная конференция IEEE по искусственному интеллекту и виртуальной реальности (AIVR, 2020 г.), 43–48. 10.1109/АИВР50618.2020.00017
[CrossRef] [Академия Google] - Бабаянс Э., Тамиз М., Сарфи Ю., Могоей А., Мехраби Э. (2018). «ROS2Unity3D; Высокопроизводительный плагин для взаимодействия ROS с движком Unity3d», в 2018 г. 9-я конференция по искусственному интеллекту и робототехнике и 2-й Азиатско-Тихоокеанский международный симпозиум, 2018 г. 9-я конференция по искусственному интеллекту и робототехнике и 2-й Азиатско-Тихоокеанский международный симпозиум, остров Киш, Иран. Доступно по адресу: https://ieeexplore.ieee.org/xpl/conhome/8764285/proceeding.
, 59–64. 10.1109/АИАР.2018.8769798
[CrossRef] [Академия Google] - Бай Х.
 , Ли С., Баррейрос Дж., Ту Ю., Поллок Ч. Р., Шеперд Р. Ф. (2020). Растягивающиеся распределенные волоконно-оптические датчики. Наука
, Ли С., Баррейрос Дж., Ту Ю., Поллок Ч. Р., Шеперд Р. Ф. (2020). Растягивающиеся распределенные волоконно-оптические датчики. Наука
370, 848–852. 10.1126/наука.aba5504
[PubMed] [CrossRef] [Академия Google] - Группа BCG (2015). [Набор данных]. Отчет о человеке и машине в индустрии 4.0: как технологии изменят промышленную рабочую силу до 2025 года? [Академия Google]
- Борхес Э. А., Ридер Дж. С. (2021). [Набор данных]. AR-фреймворк Soft Gripper. 10.4121/16943254.v1
[CrossRef] [Академия Google] - Кальдерон А. А., Угалде Дж. К., Загал Дж. К., Перес-Арансибия Н. О. (2016). «Проектирование, изготовление и управление мягким роботом из нескольких материалов и несколькими приводами, вдохновленными роющими червями», Международная конференция IEEE по робототехнике и биомиметике (ROBIO), 2016 г., 3–7 декабря 2016 г., Циндао, Китай, 31–38. . 10.1109/РОБИО.2016.7866293
[CrossRef] [Академия Google] - Чен Дж., Чжан Дж., Луо З., Чжан Дж., Ли Л., Су Ю. и др. (2020).
 Сверхэластичный, чувствительный и малогистерезисный гибкий датчик деформации на основе волнообразного жидкого металла для мониторинга активности человека. Приложение ACS Матер. Интер.
Сверхэластичный, чувствительный и малогистерезисный гибкий датчик деформации на основе волнообразного жидкого металла для мониторинга активности человека. Приложение ACS Матер. Интер.
12, 22200–22211. 10.1021/acsami.0c04709[PubMed] [CrossRef] [Академия Google] - Сообщество Б. О. (2018). Blender — пакет для 3D-моделирования и рендеринга. Амстердам: Фонд Blender, Stichting Blender Foundation. [Академия Google]
- Калха У., Нурзаман С., Клеменс Ф., Иида Ф. (2014). Svas3: Сенсоризация мягких структур с помощью вектора деформации. Датчики
14, 12748–12770. 10.3390/с140712748
[Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] - Де Фокатис Д.С.А., Халл Д., Санчес-Валенсия А. (2012). Роль предварительной деформации и гистерезиса в пьезосопротивлении проводящих эластомеров для приложений датчиков деформации. Пластмассы, резина и композиты
41, 301–309. 10.1179/1743289812г.0000000022
[CrossRef] [Академия Google] - Делла Сантина К., Бикки А., Рус Д. (2020).
 Об улучшенной параметризации состояния мягких роботов с кусочно-постоянной кривизной и ее использовании в управлении на основе моделей. IEEE-робот. автомат. лат.
Об улучшенной параметризации состояния мягких роботов с кусочно-постоянной кривизной и ее использовании в управлении на основе моделей. IEEE-робот. автомат. лат.
5, 1001–1008. 10.1109/лра.2020.2967269
[CrossRef] [Академия Google] - Дианатфар М., Латокартано Дж., Ланц М. (2021). Обзор существующих решений виртуальной и дополненной реальности для совместной работы человека и робота. Обработано ЦИРП
97, 407–411. 10.1016/j.procir.2020.05.259[CrossRef] [Академия Google] - Эльгенейди К., Лозе Н., Джексон М. (2018). Прогнозирование угла изгиба и управление мягкими пневматическими приводами со встроенными датчиками изгиба — подход, основанный на данных. Мехатроника
50, 234–247. 10.1016/ж.мехатроника.2017.10.005
[CrossRef] [Академия Google] - Гоцман К., Гамхольд С., Коббельт Л. (2002). Упрощение и сжатие 3D-сеток. Берлин, Гейдельберг: Springer Berlin Heidelberg, 319–361. 10.1007/978-3-662-04388-2_12
[Перекрестная ссылка] [Академия Google] - ПАЗ-Х (2020). [Набор данных].
 MQTT-мост. [Академия Google]
MQTT-мост. [Академия Google] - Хусейн А., Гарсия Ф., Олаверри-Монреаль К. (2018). «Структура на основе Ros и Unity для управления и моделирования интеллектуальных транспортных средств», Международная конференция IEEE по автомобильной электронике и безопасности (ICVES, 2018 г.). 12-14 сентября. 2018, Мадрид, Испания. 10.1109/ИКВЭС.2018.8519522
[CrossRef] [Академия Google] - Джонс Б.А., Уокер И.Д. (2006). Кинематика многосекционных роботов сплошной среды. IEEE транс. Робот.
22, 43–55. 10.1109/tro.2005.861458
[CrossRef] [Академия Google] - Колотурос Н., Павлакос Г., Данилидис К. (2019). «Регрессия сверточной сетки для реконструкции формы человека по одному изображению», Конференция IEEE / CVF по компьютерному зрению и распознаванию образов (CVPR), 4496–4505, 2019 г. 15-20 июня 2019 г., Мадрид, Испания. 10.1109/cvpr.2019.00463
[CrossRef] [Академия Google] - Льюис Дж. П., Корднер М., Фонг Н. (2000). «Деформация позы в пространстве», в SIGGRAPH ’00: Материалы 27-й ежегодной конференции по компьютерной графике и интерактивным методам.
 Новый Орлеан, Луизиана, США, 23–28 июля 2000 г. (США: ACM Press/Addison-Wesley Publishing Co.), 165–172. 10.1145/344779.344862
Новый Орлеан, Луизиана, США, 23–28 июля 2000 г. (США: ACM Press/Addison-Wesley Publishing Co.), 165–172. 10.1145/344779.344862
[CrossRef] [Академия Google] - Лин С., Виллемет Л., Байль А., Вертлевски М. (2020). «Определение кривизны с помощью сферического тактильного датчика с использованием цветовой интерференции массива маркеров», Международная конференция IEEE по робототехнике и автоматизации (ICRA) 2020 г., 31 мая – 31 августа 2020 г., Париж, Франция, 603–609. 10.1109/icra40945.2020.50
[CrossRef] [Академия Google] - Лоренц М., Рюссманн М., Штрак Р., Люет К.Л., Болле М. (2015). Человек и машина в индустрии 4.0: как технологии изменят рабочую силу в промышленности до 2025 г., 2. Германия: The Boston Consulting Group. [Академия Google]
- Людвиг Т., Коттхаус К., Штейн М., Пипек В., Вульф В. (2018). «Возродить старые обсуждения! Социально-технические проблемы для малых и средних предприятий в рамках Индустрии 4.0», в материалах 16-й Европейской конференции по совместной работе с компьютерной поддержкой.
 Нанси (Франция) 4–8 июня 2018 г. (Европейское общество социально встроенных технологий EUSSET; ) [Google Scholar]
Нанси (Франция) 4–8 июня 2018 г. (Европейское общество социально встроенных технологий EUSSET; ) [Google Scholar] - Лунни Д., Джордано Г., Синибальди Э., Чианкетти М., Маццолаи Б. (2018). «Оценка формы на основе фильтрации Калмана: на пути к полностью мягкой проприоцепции», Международная конференция IEEE по мягкой робототехнике (RoboSoft), 24–28 апреля 2018 г., Ливорно, Италия, 541–546. 10.1109/РОБОСОФТ.2018.8405382
[CrossRef] [Академия Google] - Магненат-Тальманн Н., Лаперьер А., Тальманн Д. (1988). «Локальные деформации, зависящие от суставов, для анимации рук и захвата объектов», в GI ’88: Proceedings of Graphics Interface ’88, 6-10 июня 1988 г., Эдмонтон, Альберта, Канада. (Торонто, Онтарио, Канада: Канадское общество связи человека и компьютера; ), 26–33. [Академия Google]
- Маццолай Б., Мондини А., Трамасере Ф., Риккоми Г., Садеги А., Джордано Г. и др. (2019). Мягкая рука, вдохновленная осьминогом, с присосками для улучшенных задач захвата в ограниченном пространстве.
 Доп. Интел. Сист.
Доп. Интел. Сист.
1, 11. 10.1002/aisy.2011
[CrossRef] [Академия Google] - Маккензи Р. М., Барраклаф Т. В., Стоукс А. А. (2017). Интеграция мягкой робототехники с операционной системой роботов: гибридная рука для захвата и размещения. Фронт. Робот. ИИ
4, 39. 10.3389/frobt.2017.00039
[CrossRef] [Академия Google] - Мукаи Т. (2018). Анимация скиннинга на основе примеров. Чам: Springer International Publishing, 2093–2112. 10.1007/978-3-319-14418-4_14
[CrossRef] [Академия Google] - Нилен А., Мюллер М., Кейзер Р., Боксерман Э., Карлсон М. (2006). Физически обоснованные деформируемые модели в компьютерной графике. вычисл. Графический форум
25, 809–836. 10.1111/j.1467-8659.2006.01000.x
[CrossRef] [Академия Google] - Нгуен Х., Новак Э., Ван З. (2022). Точная 3D-реконструкция с помощью сети Fringe-to-Phase. Измерение
190, 110663. 10.1016/j.measurement.2021.110663
[CrossRef] [Академия Google] - Ньето Дж. Р., Сусин А. (2013). «Деформации на основе клетки: обзор», в «Моделях деформации» (Дордрехт: Springer;), 75–99.
 10.1007/978-94-007-5446-1_3
10.1007/978-94-007-5446-1_3
[CrossRef] [Академия Google] - Пик И. Д., Блех Дж. О., Шембри М. (2016). «Программная среда для поддержки промышленных операций на основе дополненной реальности», в 2016 г. 21-я Международная конференция IEEE по новым технологиям и автоматизации производства (ETFA), 1–4. 6-9Сентябрь 2016 г., Берлин, Германия. 10.1109/etfa.2016.7733627
[CrossRef] [Академия Google] - Ридер Дж. (2021). [Набор данных]. DTStacks. [Академия Google]
- Румман Н. А., Фратаркангели М. (2016). «Современное состояние методов создания скинов для сочлененных деформируемых персонажей», в материалах 11-й совместной конференции по теории и приложениям компьютерного зрения, обработки изображений и компьютерной графики. VISIGRAPP, 27-29 февраля 2016 г., г. Рим, Италия. 10.5220/0005720101980210
[Перекрестная ссылка] [Академия Google] - Рансиман М., Дарзи А., Милонас Г. П. (2019). Мягкая робототехника в малоинвазивной хирургии. Мягкая робототехника
6, 423–443. 10.1089/соро.2018.0136
10.1089/соро.2018.0136
[Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] - Сарех С., Но Ю., Ли М., Ранзани Т., Лю Х., Альтофер К. (2015). Оптическое зондирование Macrobend для измерения положения мягких манипуляторов роботов. Умный Матер. Структура
24, 125024. 10.1088/0964-1726/24/12/125024
[CrossRef] [Академия Google] - Шарфф Р.Б.Н., Дорнбуш Р.М., Дубровски Э.Л., Ву Дж., Гераэдтс Дж.М.П., Ван С.С.Л. (2019). Цветовая проприоцепция мягких приводов, взаимодействующих с объектами. Ieee/asme Trans. Мехатрон.
24, 1964–1973. 10.1109/тмех.2019.2929818
[CrossRef] [Академия Google] - Шарфф Р.Б.Н., Дорнбуш Р.М., Клутвийк С.Л., Доши А.А., Дубровски Э.Л., Ву Дж. и соавт. (2018). «Цветовое определение деформации изгиба мягких роботов», Международная конференция IEEE по робототехнике и автоматизации (ICRA), 21–25 мая 2018 г., Брисбен, Квинсленд, Австралия. 4181–4187. 10.1109/icra.2018.8460521
[Перекрестная ссылка] [Академия Google] - Шарфф Р.Б.Н., Фанг Г.
 , Тянь Ю., Ву Дж., Гераэдтс Дж.М.П., Ван К.С.Л. (2021). Обнаружение и реконструкция трехмерной деформации пневматических мягких роботов. IEEE/ASME Trans. Мехатроника
, Тянь Ю., Ву Дж., Гераэдтс Дж.М.П., Ван К.С.Л. (2021). Обнаружение и реконструкция трехмерной деформации пневматических мягких роботов. IEEE/ASME Trans. Мехатроника
1, 1877–1885 гг. 10.1109/тмех.2021.3078263
[CrossRef] [Академия Google] - Шарфф Р. (2021). [Набор данных]. Наборы данных сенсорного мягкого привода. 10.4121/16943239.v2
[CrossRef] [Академия Google] - Соркин О., Алекса М. (2007). «Моделирование поверхности настолько жестко, насколько это возможно», в SGP ’07: Материалы Пятого симпозиума Eurographics по обработке геометрии. Барселона, Испания, 4–6 июля 2007 г. (Гослар, DEU: Eurographics Association; ), 109.–116. [Академия Google]
- Сотер Г., Хаузер Х., Конн А., Росситер Дж., Накадзима К. (2020). «Реконструкция формы мягких тактильных датчиков на основе ПЗС-камеры», на Международной конференции IEEE/RSJ по интеллектуальным роботам и системам. 24 октября — 24 января 2021 г., Лас-Вегас, Невада, США. 10.1109/iros45743.2020.9341698
[CrossRef] [Академия Google] - Сукумар Н.
 , Мальш Э.А. (2006). Последние достижения в построении многоугольных интерполянтов конечных элементов. Арка Вычислительные методы инж.
, Мальш Э.А. (2006). Последние достижения в построении многоугольных интерполянтов конечных элементов. Арка Вычислительные методы инж.
1313 (1), 129129–163163. 10.1007/BF023
[CrossRef] [Академия Google] - Такаяма Т., Такэсима Х., Хори Т., Омата Т. (2015). Локомотив с витыми связками труб, предложенный для мобильного робота внутри трубы. Ieee/asme Trans. Мехатрон.
20, 2915–2923. 10.1109/ТМЕЧ.2015.2411752
[CrossRef] [Академия Google] - Терзопулос Д., Платт Дж., Барр А., Флейшер К. (1987). Упругодеформируемые модели. SIGGRAPH вычисл. График
21, 205–214. 10.1145/37402.37427
[CrossRef] [Академия Google] - Турутель Т. Г., Ши Б., Ласки К., Толли М. Т. (2019). Восприятие мягкого робота с использованием встроенных мягких датчиков и рекуррентных нейронных сетей. науч. Робот
4, eaau2489. 10.1126/scirobotics.aav1488
[PubMed] [CrossRef] [Академия Google] - Тилль Дж., Алои В., Рукер К. (2019). Динамика мягких и сплошных роботов в реальном времени на основе моделей стержней Коссера.
 Междунар. Дж. Робототехника Рез.
Междунар. Дж. Робототехника Рез.
38, 723–746. 10.1177/02783642269
[CrossRef] [Академия Google] - ван ден Берг С.К., Шарфф Р.Б.Н., Русак З., Ву Дж. (2020). «Биомиметический дизайн мягкой роботизированной рыбы для высокоскоростного передвижения», в Biomimetic and Biohybrid Systems (Cham: Springer International Publishing;), 366–377. 10.1007/978-3-030-64313-3_35
[CrossRef] [Академия Google] - Ван Меербик И.М., Де Са К.М., Шеперд Р.Ф. (2018). Мягкие оптоэлектронные сенсорные пены с проприоцепцией. науч. Робот
3. 10.1126/scirobotics.aau2489
[PubMed] [CrossRef] [Академия Google] - Ван Х., Тотаро М., Беккай Л. (2018). На пути к восприимчивым мягким роботам: прогресс и вызовы. Доп. науч.
5, 1800541. 10.1002/advs.201800541
[Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] - Ван Р., Ван С., Ду С., Сяо Э., Юань В., Фэн К. (2020). Трехмерная проприоцепция мягкого тела в реальном времени с помощью сенсоров на основе глубокого зрения. IEEE-робот.
 автомат. лат.
автомат. лат.
5, 3382–3389. 10.1109/лра.2020.2975709
[CrossRef] [Академия Google] - Ван С., Го Р., Лю Дж. (2019). Мягкая робототехника на основе жидкого металла: материалы, конструкции и приложения. Доп. Матер. Тех.
4, 1800549. 10.1002/адм.201970009
[CrossRef] [Академия Google] - Уорд-Черриер Б., Пестелл Н., Крэмпхорн Л., Уинстон Б., Джанначчини М.Е., Росситер Дж. и соавт. (2018). Семейство TacTip: мягкие оптические тактильные датчики с биомиметическими морфологиями, напечатанными на 3D-принтере. Мягкая робототехника
5, 216–227. 10.1089/соро.2017.0052
[Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] - Ян М., Вэнь Ю., Чен В., Чен Ю., Цзя К. (2021). «Глубоко оптимизированные априорные модели для трехмерного моделирования и реконструкции», на конференции IEEE/CVF по компьютерному зрению и распознаванию образов (CVPR) 2021 г., 20–25 июня 2021 г., Нэшвилл, Теннесси, США. 3268–3277. 10.1109/cvpr46437.2021.00328
[CrossRef] [Академия Google] - Чжао Х.
 , О’Брайен К., Ли С., Шеперд Р.Ф. (2016). Мягкий протез руки с оптоэлектронной иннервацией через растягиваемые оптические волноводы. науч. Робот
, О’Брайен К., Ли С., Шеперд Р.Ф. (2016). Мягкий протез руки с оптоэлектронной иннервацией через растягиваемые оптические волноводы. науч. Робот
1, eaai7529. 10.1126/scirobotics.aai7529[PubMed] [CrossRef] [Google Scholar]
Статьи из Frontiers in Robotics and AI предоставлены здесь с разрешения Frontiers Media SA
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 [rbtfBook]. Херб Грин внес большой вклад в теорию архитектуры, сформулировав свою концепцию арматуры. К сожалению, насколько я могу судить, эта концепция в значительной степени игнорируется. Он не только проливает свет на проблемы масштаба, но и эффективно затрагивает роль истории, необходимость сохранения архитектуры и указывает на разрешение того, что часто считается конфликтом между новыми и старыми работами. Armature также напрямую обращается к необходимости участия художников и горожан в создании общественного пространства. Отсутствие всего этого является основной причиной отчуждения человека от застроенной среды, особенно от города.
[rbtfBook]. Херб Грин внес большой вклад в теорию архитектуры, сформулировав свою концепцию арматуры. К сожалению, насколько я могу судить, эта концепция в значительной степени игнорируется. Он не только проливает свет на проблемы масштаба, но и эффективно затрагивает роль истории, необходимость сохранения архитектуры и указывает на разрешение того, что часто считается конфликтом между новыми и старыми работами. Armature также напрямую обращается к необходимости участия художников и горожан в создании общественного пространства. Отсутствие всего этого является основной причиной отчуждения человека от застроенной среды, особенно от города. Будем надеяться, что это также будет верно и в более широком смысле для всей профессии. Идея Херба Грина сейчас нужна даже больше, чем в прошлом, и я верю, что она будет иметь решающее значение для будущего воплощения жизнеспособных городских пейзажей. Посетите его веб-сайт и насладитесь уникальной интеграцией архитектуры, философии и искусства:
Будем надеяться, что это также будет верно и в более широком смысле для всей профессии. Идея Херба Грина сейчас нужна даже больше, чем в прошлом, и я верю, что она будет иметь решающее значение для будущего воплощения жизнеспособных городских пейзажей. Посетите его веб-сайт и насладитесь уникальной интеграцией архитектуры, философии и искусства: Его основные
Его основные В этих дискуссиях я
В этих дискуссиях я Почти все, что
Почти все, что
 ,
, Арматура и разнообразие — это взаимные силы, которые необходимо поддерживать в равновесии, чтобы системы оставались жизнеспособными.
Арматура и разнообразие — это взаимные силы, которые необходимо поддерживать в равновесии, чтобы системы оставались жизнеспособными.
 Он твердый и длинный
Он твердый и длинный Почему должно легко меняться
Почему должно легко меняться Внутри этой Арматуры существует удивительное разнообразие:
Внутри этой Арматуры существует удивительное разнообразие: Этот торговый центр, как он развивался
Этот торговый центр, как он развивался Концепция арматуры
Концепция арматуры Купол освящает рабочий центр и ссылается на обстановку.
Купол освящает рабочий центр и ссылается на обстановку. SPACE создается только с этими
SPACE создается только с этими
 , все Арматуры, показанные ниже, находятся в стадии разработки — проектирования и изготовления. Еще несколько проектов находятся на чертежных досках. Вполне вероятно, что в течение следующих нескольких лет примеры приложений Armature удвоят количество построенных работ за последние 15 лет.
, все Арматуры, показанные ниже, находятся в стадии разработки — проектирования и изготовления. Еще несколько проектов находятся на чертежных досках. Вполне вероятно, что в течение следующих нескольких лет примеры приложений Armature удвоят количество построенных работ за последние 15 лет.
 Она не случайна и не произвольна — она целенаправленна. Эти чертежи и фотографии представляют собой задуманную и установленную арматуру. это работа для Всемирного экономического форума, Министерства по делам ветеранов США, Ales Groupe в Милане, Италия, и Unicredit в Турине, Италия.
Она не случайна и не произвольна — она целенаправленна. Эти чертежи и фотографии представляют собой задуманную и установленную арматуру. это работа для Всемирного экономического форума, Министерства по делам ветеранов США, Ales Groupe в Милане, Италия, и Unicredit в Турине, Италия.
 Это небольшой пример того, что Херб Грин хотел сделать в масштабе городского пейзажа. Это демонстрация жизнеспособности этой идеи.
Это небольшой пример того, что Херб Грин хотел сделать в масштабе городского пейзажа. Это демонстрация жизнеспособности этой идеи. Показанные здесь примеры только начинают мелькать на поверхности того, чего можно достичь, добавляя эту концепцию в набор инструментов языка шаблонов архитектора. По мере того, как архитектура становится все более эфирной — как, кажется, современная тенденция с новыми материалами — прочная арматура, которая связывает произведение с городским пейзажем, землей и социальным контекстом, становится все более важной. Арматура, в конце концов, становится сильнейшим элементом, говорящим о культуре места. Это делает сильную память. Он объединяет идею и физический факт в мире, где они, к сожалению, все больше и больше раздваиваются.
Показанные здесь примеры только начинают мелькать на поверхности того, чего можно достичь, добавляя эту концепцию в набор инструментов языка шаблонов архитектора. По мере того, как архитектура становится все более эфирной — как, кажется, современная тенденция с новыми материалами — прочная арматура, которая связывает произведение с городским пейзажем, землей и социальным контекстом, становится все более важной. Арматура, в конце концов, становится сильнейшим элементом, говорящим о культуре места. Это делает сильную память. Он объединяет идею и физический факт в мире, где они, к сожалению, все больше и больше раздваиваются. В эпоху, когда понятие почти потеряло смысл, Херб — джентльмен первой степени. Он уникальная личность и оригинальный мыслитель. Он является важной фигурой в переходный период между первыми мастерами органической архитектуры, и можно надеяться на возрождение этого подхода к созданию среды обитания. Как я уже отмечал, его концепция Арматуры в значительной степени игнорировалась, но есть признаки того, что так будет не долго. Без атрибуции и полного понимания идея начинает находить свое применение в построенных работах. Видя его рисунки в натуральную величину и разговаривая с ним, я еще больше убеждаюсь в том, что его работы должны быть более полно изучены и применены. Я давно уважаю его как архитектора, и теперь я с большим удовольствием считаю его своим другом и соратником в деле органической архитектуры.
В эпоху, когда понятие почти потеряло смысл, Херб — джентльмен первой степени. Он уникальная личность и оригинальный мыслитель. Он является важной фигурой в переходный период между первыми мастерами органической архитектуры, и можно надеяться на возрождение этого подхода к созданию среды обитания. Как я уже отмечал, его концепция Арматуры в значительной степени игнорировалась, но есть признаки того, что так будет не долго. Без атрибуции и полного понимания идея начинает находить свое применение в построенных работах. Видя его рисунки в натуральную величину и разговаривая с ним, я еще больше убеждаюсь в том, что его работы должны быть более полно изучены и применены. Я давно уважаю его как архитектора, и теперь я с большим удовольствием считаю его своим другом и соратником в деле органической архитектуры.
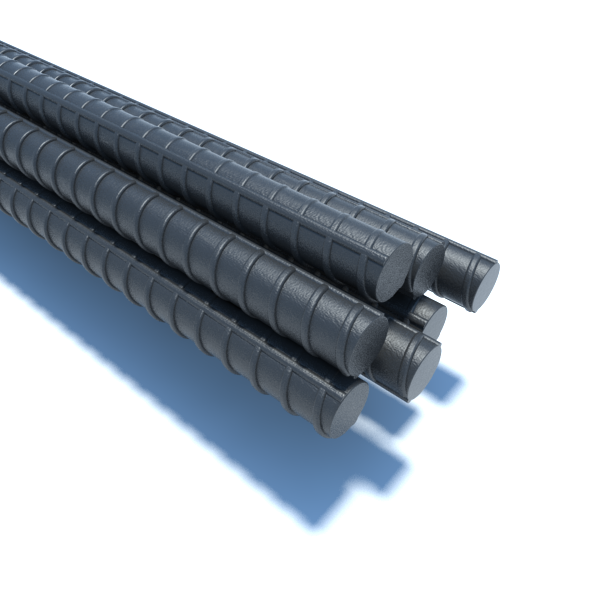
 org
org арматура в одной раме | Esempi di frasi dal Кембриджский словарь
Квалифицированное мнение, не имеющее отношения к мнению редактора Кембриджского словаря или издательства Кембриджского университета, не имеющее лицензии.
Летальное действие цибариального и глоточного аппаратов комаров на микрофилярий.
Да Кембриджский корпус английского языка
Он начинает с фамильяров святых и инструментов, но здесь они поддерживают арматуру, а не фокусы.
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
Другая группа, сотканная в основном в 1968-69 годах, состояла из больших смелых женских фигур, чьи руки и туловище круглой формы подвешены на изогнутом каркасе.
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
Более высокие скорости приводили к чрезмерной нагрузке на якорь тягового двигателя.
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
Каждый двигатель имеет два отдельных якоря, фактически два двигателя в одном блоке.
Тратта да
Википедия
Это использование является переводом из Википедии и может быть использовано в соответствии с лицензией CC BY-SA.
В начале 1980-х двигатели были усовершенствованы с пятиполюсным якорем.
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
Формовочная плита также изготавливается в виде труб и колец для изоляции якорей, стартеров и трансформаторов.
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
Поддерживающие булыжники несут надписи различных легенд о звездах, на которые направлена их арматура.
Тратта да
Википедия
Это использование является переводом из Википедии и может быть использовано в соответствии с лицензией CC BY-SA.
Все персонажи были сделаны из формованного пластилина на металлическом каркасе и сняты с покадровой глиняной анимацией.
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
Physique использует двуногие каркасы для анимации реальной сетки персонажа, имитируя то, как сетка изгибается и выпячивается при движении основного скелета.
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
Двигатели имели двойной якорь, поэтому было четыре полудвигателя, что позволяло группировать двигатели в три группы: полностью последовательно, последовательно-параллельно и полностью параллельно.
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
В конечном счете, источником энергии, рассеиваемой в системе динамического торможения, является движение локомотива, сообщаемое якорям тяговых двигателей.
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
В 1980-х годах она стала известна благодаря работам из воска, гипса, дерева и проволочной арматуры.
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
Катящиеся колеса вращают якоря двигателей, и когда поля двигателей возбуждаются, двигатели действуют как генераторы.
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
Магниты
с задним железом образуют движитель, который перемещается внутри якоря , образованного из проводников внутри пазов и заднего сердечника.
Да Кембриджский корпус английского языка
Художник добился физического присутствия скульптур, сплетя волокна и связывая бечевку узлом в скульптурную сетку, подвешенную к стальным арматурам с порошковым покрытием.
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
На импеданс электромагнитного клапана сильно влияют вихревые токи в горшке-магните и арматура .
Да Кембриджский корпус английского языка
Магнитный бак, якорь и зонд были отожжены в атмосфере азота.
Да Кембриджский корпус английского языка
За счет уменьшения зазора между якорем и магнитным валом дополнительно увеличивается магнитная сила.
Кембриджский корпус английского языка
Предварительно напряженная нажимная пружина удерживает якорь в верхнем положении.
Да Кембриджский корпус английского языка
Он построил эти модели, используя стальную арматуру и вспененный латекс.
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
У цирруса гладкая поверхность без видимой арматуры .
Да Кембриджский корпус английского языка
Сами колбы могли быть сняты, а их крышки крепились на арматуре -трубка с помощью проходных трубок.
Да Кембриджский корпус английского языка
Линейные рельсотроны состоят из двух плоских пластинчатых электродов, разделенных изолирующими прокладками, и ускорительной листовой арматуры.
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
Базовая арматура была металлической, с проволочной сеткой, использованной для создания общей формы, затем набитой газетой.
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
Якоря не имели катушек, но имели индуктивные витки.
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
Его практика простирается от архитектуры интерьера до дизайна мебели и изделий, дизайна осветительной арматуры и дизайна лодок.
Тратта да
Википедия
Это использование является переводом из Википедии и может быть использовано в соответствии с лицензией CC BY-SA.
Визирные кольца на арматуре определяют определенные звезды в созвездиях.
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
Поскольку движущиеся части небольшие и легкие, герконовые реле могут переключаться намного быстрее, чем реле с якорем.
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
С другой стороны, вокруг больших столов, находится группа арматурных намотчиков.
Да Кембриджский корпус английского языка
г.
Вода попала в машинное отделение после ослабления болтов крепления арматуры котла к палубе.
Да Кембриджский корпус английского языка
Ослабились болты крепления арматуры котла к палубе и вода хлынула в машинное отделение.
Да Кембриджский корпус английского языка
Рассматривается динамика второго порядка электроприводов с пренебрежимо малыми индуктивностями якоря .
Да Кембриджский корпус английского языка
Рассматривается динамика второго порядка электроприводов с пренебрежимо малыми индуктивностями якоря .
Да Кембриджский корпус английского языка
Катящиеся колеса локомотива вращают якоря двигателей, и если поля двигателей возбуждены, двигатели будут действовать как генераторы.
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
Большие окна, установленные в общественных зданиях и церквях этого периода, также использовали прямоугольные стекла свинцового света, поддерживаемые арматурой, подчеркивающей классический дизайн окон.
Tratta da
Википедия
Это использование является переводом из Википедии и может быть использовано в соответствии с лицензией CC BY-SA.
Арматура играет двоякую роль.
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
Щупальце метабазальное Арматура наружная, переходная зона в форме цепочки.
Да Кембриджский корпус английского языка
Пилотный эксперимент, в котором прозрачная арматура -пробирка была проверена через стереомикроскоп, гарантировал, что церкарии не вылетают из колб через соединительные трубы.
Да Кембриджский корпус английского языка
Структура головного каркаса (окрашенного альциановым синим) видоспецифична, но имеет ограниченное применение, поскольку ее часто трудно увидеть.
Да Кембриджский корпус английского языка
После этих первых 1,2 мс магнитная сила достаточно велика, чтобы преодолеть предварительное напряжение, и происходит ускорение якоря в направлении магнита горшка.
Да Кембриджский корпус английского языка
Генераторы имели вращающийся якорь.
Тратта да
Википедия
Это использование является переводом из Википедии и может быть использовано в соответствии с лицензией CC BY-SA.
Поверхностное разрушение арматуры спиральных генераторов флюсового сжатия.
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
Механическая эквивалентная схема в случае зажатого якоря .
Да Кембриджский корпус английского языка
Якорь с нулевым зазором или автоматическим износом может изнашиваться менее чем на половину своей первоначальной толщины, что в конечном итоге приведет к пропуску зацепления.
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
Очень высокие значения тока якоря будут создавать очень сильное противодействующее магнитное поле, которое может размагнитить магниты, что приведет к необратимому изменению характеристик двигателя.
Да Кембриджский корпус английского языка
Если катушка возбуждается электрическим током, возникает магнитная сила между потенциометром и якорем , которая вызывает движение 0053 арматура .
Да Кембриджский корпус английского языка
Якорь и потенциометр изготовлены из нелегированной стали.
Да Кембриджский корпус английского языка
Постепенно внутренние опоры фигур (сварные каркасы) стали ей интереснее изобразительных поверхностей, и она создала серию абстрактных сварных скульптур.
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
Зубной ряд гипостомы всегда 31 3, а тазовая арматура настолько однородна, что от ее изучения можно ожидать лишь незначительной помощи.
Да Кембриджский корпус английского языка
Влияние дефектов на якорь в спиральных генераторах сжатия потока.
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
Можно было бы считать это более тонкой эволюцией основных концепций арматуры самолетов, или что арматура была довольно неполным и/или общим описанием.
Да Кембриджский корпус английского языка
В течение первых 1,2 мс после включения напряжения магнитная сила меньше механического предварительного напряжения, что предотвращает перемещение якоря .
Да Кембриджский корпус английского языка
Арматура имеет малую инерцию.
Да Кембриджский корпус английского языка
г.
Среди находок внутри главной камеры были драгоценные предметы, такие как инкрустации и фрагменты мебели (особенно пьедесталы), медная арматура и украшения из черного дерева, аметиста и бирюзы.
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
Без хвостовых шипов или других шипов арматура .
Да Кембриджский корпус английского языка
Смоделированное и измеренное движение арматуры .
Да Кембриджский корпус английского языка
Если это что-то большее, например сгоревшая арматура , вероятно есть запасная, которую можно быстро ввести в эксплуатацию.
Тратта да
Архив Hansard
Esempi tratti dall’archivio Hansard. Contiene datati parlamentari concessi ai sensi della Licenza libera parlamentare v3.0
Устройство состояло из якоря , вращающегося между полюсами подковообразного магнита.
Tratta da
Архив Hansard
Esempi tratti dall’archivio Hansard. Contiene dati parlamentari concessi ai sensi della Licenza libera parlamentare v3.0
Якорь Падение реакции — это влияние магнитного поля на распределение потока под главными полюсами генератора.
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
Поскольку якорь намотан витками проволоки, в
создается магнитное поле.0053 якорь всякий раз, когда в катушках протекает ток.
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
Рядом металлическая арматура и вертикальная книга. 9 прыгает с доски на арматуру , которая подбрасывает его к книге.
Тратта да
Википедия
Это использование является переводом из Википедии и может быть использовано в соответствии с лицензией CC BY-SA.
Двигатель можно использовать для вращения барабана (как вперед, так и назад) путем переключения обмотки возбуждения относительно якоря .
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
Арматура проема — это признак, который не проявляется до полной зрелости.
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
Катушки возбуждения соединены последовательно или параллельно с обмоткой якоря .
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
Для повышения эффективности магнитной цепи было понято, что несколько магнитных путей могут быть обеспечены через один и тот же якорь .
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
В этот момент противоЭДС равна нулю, и единственным фактором, ограничивающим ток якоря , является сопротивление и индуктивность якоря .
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
В двигателе с параллельным возбуждением катушки возбуждения соединены параллельно или шунтированы с якорь катушки.
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
В электрическом будильнике в виде звонка звонок звонит с помощью электромагнитной цепи и якоря , который многократно включает и выключает цепь.
Tratta da
Википедия
Это использование является переводом из Википедии и может быть использовано в соответствии с лицензией CC BY-SA.
Двигатель не был отдельным блоком; вместо этого его отдельные элементы — магниты , якорь , коллектор и щетки — укладываются в углубления в блочном шасси.
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
Два колеса по восемь вагонов соединялись арматурой .
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
Различное количество полей статора и якоря , а также то, как они соединены, обеспечивают различные собственные характеристики регулирования скорости/крутящего момента.
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
Он гордится тем, что раскрывает рациональную арматуру поэзии и детали ее конструкции.
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
На этом этапе готовую голову можно прикрепить к основной арматуре и соединить с корпусом дополнительным пластилином.
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
Стекло удерживается стальной арматурой , окрашенной в синий цвет.
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
Якорь может быть на роторе или статоре.
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
Несмотря на свою полезность в оружии и арматуре , адамантий редко используется из-за его высокой стоимости и невозможности изменения формы.
Tratta da
Wikipedia
Questo esempio è tratto Da Wikipedia e può essere riutilizzato ai sensi della licenza CC BY-SA.
Мне всегда нравилось делать вещи, которые в конце концов могут стать каркасом здания.
Да Кембриджский корпус английского языка
Для учета доиндустриальной городской арматуры или каркаса обычно используются два типа моделей.
Да Кембриджский корпус английского языка
Основными частями являются якорь и цилиндрический магнит, изготовленные из магнитомягкого материала.
Да Кембриджский корпус английского языка
г.
Магниты образуют более короткий элемент, который перемещается внутри арматуры .
Да Кембриджский корпус английского языка
Поток в двигателе протекает через магниты, зубья, сердечник магнита, а также железо якоря , образуя замкнутый контур.
Да Кембриджский корпус английского языка
Ротовой аппарат редуцированный, без видимых арматура ; лабеллы выступающие, мясистые.
Да Кембриджский корпус английского языка
Кроме того, на практике они имеют двигатель ограничение тока якоря и ограничение напряжения батареи.
Да Кембриджский корпус английского языка
Трением двигателя и потерями в обмотке пренебрегают, поэтому якорь можно смоделировать как чисто инерционный.
Да Кембриджский корпус английского языка
Однако рассеивание энергии в якоре двигателя для трапециевидного на 20,83% меньше, чем в случае треугольного профиля.
Да Кембриджский корпус английского языка
Щечно-глоточный каркас личинки третьей стадии получен путем вскрытия пупария.
Да Кембриджский корпус английского языка
В начале симуляции якорь находится в состоянии покоя, и магнитная сила одинакова для обоих симуляций.
Да Кембриджский корпус английского языка
Воздушный зазор между якорем и магнитным бачком составляет 2 мм.
Да Кембриджский корпус английского языка
г.
По крайней мере, это обеспечит основу, арматуру , для студентов-архитекторов, которые начинают только с собственных ресурсов.
Да Кембриджский корпус английского языка
В этой конфигурации арматура представляет собой полый цилиндр с проводниками, образующими кольца в пазах.
Да Кембриджский корпус английского языка
г.
Полное мнение редактора Кембриджского словаря или издательства Кембриджского университета, не имеющего лицензии.
Арматура гетов | Mass Effect Wiki
Арматура Гет
Раса
Гет
Тип
Синтетический
Вооружение
Осадная импульсная пушка
Пулеметы с ускорением массы
Способности
Нет
Здоровье
Высокая
Экраны
Высокий
Местоположение
Ферос, Новерия, Терум, Илос, Вермайр, Метгос, Касбин, Ксавин
Арматура гетов — это мобильное противотранспортное и противопехотное подразделение, используемое в зонах повышенного риска и часто сбрасываемое непосредственно с десантного корабля гетов.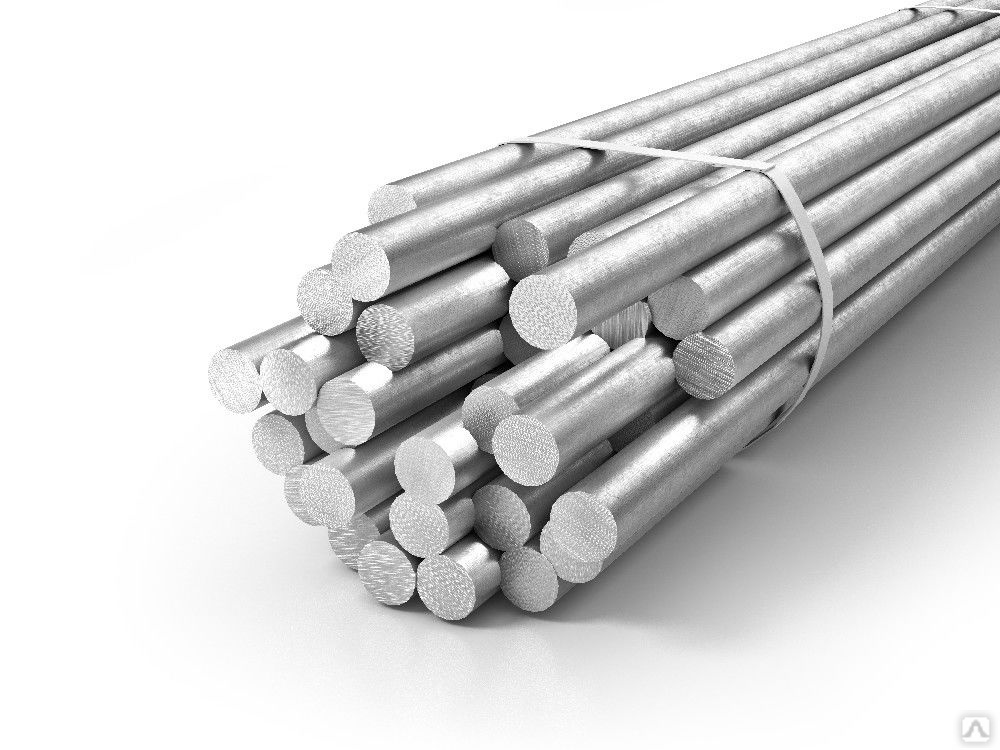 Подразделение состоит из четвероногого «танка» или «ходока» и обычно сопровождается гетами-ракетчиками. Вооруженный превосходной огневой мощью и штурмовой пушкой Siege Pulse, этот гет легко может сравниться с бронетехникой других рас. Его основное вооружение смертоносно, но перезаряжается медленно, но Арматура гетов компенсирует это, сбивая пехоту меньшим вспомогательным оружием, которое, хотя и не такое мощное, как у Мако, стреляет быстрее, что делает очень опасным поражение Арматуры с близкого расстояния. .
Подразделение состоит из четвероногого «танка» или «ходока» и обычно сопровождается гетами-ракетчиками. Вооруженный превосходной огневой мощью и штурмовой пушкой Siege Pulse, этот гет легко может сравниться с бронетехникой других рас. Его основное вооружение смертоносно, но перезаряжается медленно, но Арматура гетов компенсирует это, сбивая пехоту меньшим вспомогательным оружием, которое, хотя и не такое мощное, как у Мако, стреляет быстрее, что делает очень опасным поражение Арматуры с близкого расстояния. .
Арматуры — это разумные синтетические формы жизни, способные к независимому мышлению, обучению и действию. В неактивном состоянии Арматуры складываются в компактное состояние, что позволяет упаковывать их в контейнеры или размещать в небольших помещениях. Эта особенность в сочетании с их вооружением делает Armatures идеальными для гарнизонных сил или для засад.
Колосс гетов похож на Арматурный, но крупнее и лучше вооружен.
Тактика
- Арматуры обычно встречаются в районах, где предполагается использовать Мако.
 Осадный импульс может убить пешую пехоту одним выстрелом, поэтому пригибайтесь, когда Арматура готовится к выстрелу (для перезарядки оружия требуется несколько секунд). Осадный импульс также довольно быстро истощает щиты Мако, но взрыва можно избежать. за счет использования реактивных двигателей Мако.
Осадный импульс может убить пешую пехоту одним выстрелом, поэтому пригибайтесь, когда Арматура готовится к выстрелу (для перезарядки оружия требуется несколько секунд). Осадный импульс также довольно быстро истощает щиты Мако, но взрыва можно избежать. за счет использования реактивных двигателей Мако. - Хорошей тактикой является таран Арматуры, который ненадолго сбивает ее с ног и позволяет Мако атаковать из своей пушки, пока Арматура пытается встать. Если щиты Арматуры опущены, двух или трех (в зависимости от сложности) последовательных выстрелов из пушки Мако должно быть достаточно, чтобы уничтожить ее, даже когда Арматура полностью здорова. Если Арматура окружена меньшими войсками гетов, обычно хорошей идеей будет сначала уничтожить пешую пехоту, а затем сконцентрироваться на более сильной Арматуре гетов. В целом Арматуры не представляют большой угрозы для Мако; их осадные импульсы, хотя и наносят большой урон, от них можно легко увернуться на расстоянии, и даже если они соединятся, Мако может получить гораздо больше урона, чем Арматура.

- Пешком лучшая тактика — поднять Арматуру, которая сделает ее беспомощной и выведет из строя на несколько секунд, когда она приземлится, а затем поразить ее техническими навыками, такими как Саботаж и Перегрузка. Только Мастер Бросок способен сбить Арматуру. Стрельба по арматуре вольфрамовыми боеприпасами, особенно в сочетании с Ликвидацией, очень быстро нанесет огромный урон. В обороне персонажи с активным иммунитетом высокого уровня могут пережить даже прямые попадания из основного орудия Арматуры, особенно если они носят более тяжелую броню с установленными модами защиты от повреждений, однако прямые попадания могут привести к нокдауну, поэтому уклонение по-прежнему является хорошей идеей. Поскольку выстрелы из основной пушки имеют область действия, хрупких персонажей следует держать подальше от более сильных персонажей, которые могут выдерживать удары.
- Если вы предпочитаете использовать снайперскую винтовку против Арматур, найдите возвышенность в месте, где вы защищены от ее Осадного импульса, прежде чем использовать Ликвидацию.
 Взлом ИИ также эффективен, особенно если поблизости есть другие геты, но он должен быть на уровне Мастера, чтобы напрямую работать с арматурой. Если Арматура очень близко, продолжайте двигаться (если возможно, бегом), чтобы избежать осадного импульса, иначе один взрыв может уничтожить всю вашу команду.
Взлом ИИ также эффективен, особенно если поблизости есть другие геты, но он должен быть на уровне Мастера, чтобы напрямую работать с арматурой. Если Арматура очень близко, продолжайте двигаться (если возможно, бегом), чтобы избежать осадного импульса, иначе один взрыв может уничтожить всю вашу команду. - Комбинирование тактик также возможно. Тараньте Арматуру и припаркуйте Мако на оглушенном гете, не давая ему прийти в себя. Выйдите из Мако и убейте его из стрелкового оружия. Убив его пешком, вы также получите более высокую награду в виде опыта. Проверьте свою цель, так как Мако уязвим для дружественного огня.
- Если по какой-то причине во время боя вы окажетесь подавлены, или если есть два Арматура, используйте Стазис. Стазис выведет Арматуру из боя и даст вам время на планирование, или, если есть две Арматуры, поместив одну в Стазис, вы сможете сконцентрировать огневую мощь на другой. Самый быстрый способ убить Арматуру — врезаться в опасные места; например лава, или протаранить его через край Протеанского небесного пути на Феросе или скалы на Новерии убьет его мгновенно.

- Арматуры имеют высокий уровень сопротивления технологиям и биотике по сравнению с большинством меньших противников, поэтому все такие таланты имеют меньшую эффективность и продолжительность против них, поэтому важно иметь быстрое время перезарядки и распределять способности вашей команды, чтобы не перекрывать их без необходимости. держите их выведенными из строя достаточно долго, чтобы сбить их пешком. Рассмотрите возможность отключения использования отрядной мощи.
- Арматуры медленно поворачиваются и могут стрелять из своего большого импульсного оружия только прямо вперед, поэтому, если идти пешком, постоянно стреляя вправо или влево при непрерывной стрельбе, можно сбить арматуру с небольшим уроном, если он вообще будет получен, особенно на более высоком уровне. вооружение.
Общая информация
- Geth Armatures дебютировали в демо-версии X06 во время битвы на Калестоне; Шепард заметил, что геты не стали бы использовать Арматуру только для того, чтобы убить несколько пойманных в ловушку шахтеров, и ее присутствие возбудило интерес командира.