Модели станка: Классификация и расшифровка токарных станков
Содержание
Виртуальные модели станков — ООО «Центр СПРУТ-Т»
Виртуальные модели станков
фрезерная обработка
- Обрабатывающий центр Willemin-Macodel 508 MT
- Создание виртуальной модели станка с кинематической схемой
- Создание реалистичных 3D моделей инструмента
- Задание конфигурации станка
Токарная обработка
- Многофункциональный токарно-фрезерный центр Nakamura
- Виртуальная наладка револьвера
- Реализация синхронной обработки
Многокоординатная фрезерная обработка
- Обрабатывающий центр Mikron VCE600
- Сквозной процесс от создания виртуального станка до готовой детали
При современных компоновках станков большое количество рабочих узлов, движущихся одновременно, создают опасность соударений внутри станка.
 Для того чтобы избежать этого нужны виртуальные станки в CAM-системе.
Для того чтобы избежать этого нужны виртуальные станки в CAM-системе.
Виртуальный станок представляет собой набор трехмерных моделей всех рабочих органов реального станка и позволяет обеспечить полную идентичность процесса обработки в SprutCAM с процессом обработки на реальном оборудовании. При использовании виртуального станка в SprutCAM траектория движения инструмента и рабочих органов формируется с учетом кинематики станка и возможных столкновений.
Виртуальный станок в SprutCAM это:
- защита дорогостоящего оборудования и инструмента от столкновений
- защита деталей от зарезов и повреждений
Создание виртуальной модели станка с кинематической схемой
Создание 3D модели станка в CAD-системе
3D геометрия станка может быть создана в любой CAD-системе
Импорт в SprutCAM напрямую из CAD-системы
Импорт в SprutCAM через промежуточный формат (IGES, STEP, STL и др.
 )
)После импорта в SprutCAM, 3D геометрия сохраняется во внутреннем osd формате
Посмотрите видео, демонстрирующее подготовку 3D модели для использования в SprutCAM
Описание кинематики станка
Характер движения рабочих органов
Задание условий и ограничений
Все параметры сохраняются в специальном xml файле
Создание реалистичных 3D моделей инструмента
Загружайте 3D модели инструмента от производителя или созданные Вами
Импорт в SprutCAM напрямую из CAD-системы или в промежуточном формате (IGES, STEP, STL и др.)
Используйте и редактируйте параметрические 3D модели из встроенной библиотеки инструментов SprutCAM
Конфигурация станка
Обрабатывающий центр Willemin-Macodel 508 MT
Система ЧПУ: Fanuc 31i-A5
8 управляемых осей
Токарно-фрезерный шпиндель с поворотной осью
Трехпозиционный револьвер
(противошиндель/тиски/задний центр)
Виртуальная модель станка Mikron с поворотным столом
Обрабатывающий центр Mikron VCE600
Поворотный стол LEHMANN Т1-507510
5 управляемых осей (3+2)
Система ЧПУ: Heidenhain iTNC530
Система ЧПУ стола: Fanuc 35iB
Более подробно о данном виртуальном станке смотрите в разделе: Примеры внедрения SprutCAM
Сквозной процесс от создания виртуальной модели станка до готовой детали
Пример создания виртуальной модели многофункционального токарно-фрезерного центра Nakamura
Обрабатывающий центр Nakamura Super NTJ
9 управляемых осей
Количество одновременно управляемых осей (4+4)
Два шпинделя и две револьверных головки
Система ЧПУ: Fanuc 18i-TB
Условия и ограничения
Допустимый диапазон вращения оси B1: -91º…+91º
При работе на главном шпинделе B1<=0, на противошпинделе B1>=0
Разделение операций по каналам: первый канал — операции верхнего револьвера, второй канал — нижнего револьвера
Наладка револьвера станка
Сборка виртуального станка
При наладке выбор из 6 типов блоков для верхнего револьвера и 12 типов блоков для нижнего
Разработаны операции простого перехвата и перехвата с отрезкой, в соответствии с документацией станка
Реализация синхронной обработки с использованием виртуальной модели станка
При использовании виртуального станка в
SprutCAM траектория движения инструмента и рабочих органов формируется уже с учетом избегания всех возможных коллизий.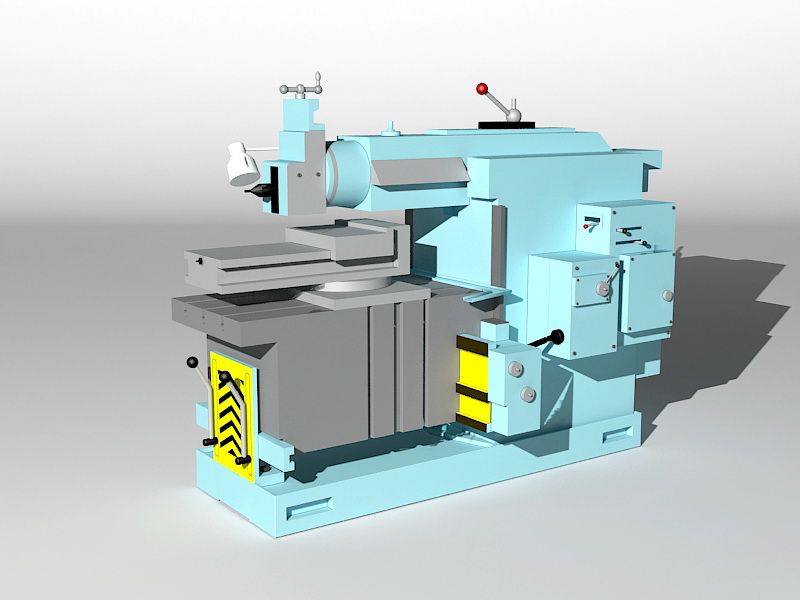 При этом осуществляется синхронизация движения рабочих органов и недопущение конфликтов в рабочей зоне, и как следствие — обеспечение оптимальной и безаварийной работы станка.
При этом осуществляется синхронизация движения рабочих органов и недопущение конфликтов в рабочей зоне, и как следствие — обеспечение оптимальной и безаварийной работы станка.
Все это обеспечивается с помощью:
— моделирования синхронизации до 4-х инструментальных узлов одновременно;
— покадровой синхронизации при многоканальной обработке;
— автоматического формирования бесконфликтной синхронной работы;
— идентичности процесса моделирования с реальным процессом обработки.
Реальная виртуальность в SprutCAM — надежная работа на производстве
Примеры выполненных виртуальных схем станков
3-х осевые фрезерные
4-х осевые фрезерные
5-и осевые фрезерные AC
5-и осевые фрезерные BC
6-и осевые
8-ми осевые
Токарные
Токарно-фрезерные
Токарные автоматы
Электроэрозионные
Шлифовальные
Роботы
Универсальный токарно-винторезный станок модели LZ 400 VS
Цена: По запросу
Заказать
Рабочая зона
Высота центров, мм
200
Расстояние между центрами, мм
1.000
Максимальный диаметр обработки над станиной, мм
400
Максимальный диаметр обработки над суппортом, мм
225
Ширина станины, мм
260
Высота станины, мм
260
Расстояние от оси шпинделя до пола, мм
1.150
Токарный шпиндель
Конус шпинделя (размер) по стандарту DIN 55027
6
Диаметр отверстия токарного шпинделя, мм
62
Внутренний конус шпинделя по DIN 228
ME 70
Диаметр токарного патрона, мм
200 (опц. 250)
Максимальный диаметр планшайбы, мм
355
Диаметр зажимной цанги (толкающего типа), мм
60
Инструментальный суппорт
Поперечный ход суппорта, мм
210
Ход верхней каретки суппорта, мм
115
Угол поворота верхней каретки
+180⁰ / — 180⁰
Высота державки резца, мм
25
Шаг резьбы ходового винта, мм
6
Подачи
Продольная подача, мм/об.
0,01 — 10
Поперечная подача, мм/об.
0,004 — 3,6
Шаг нарезаемой резьбы (метрическая), мм
0,10 — 80
Инструментальная система
Тип инструментальной системы
размер В
Задняя бабка
Тип задней бабки
ручная
Ход пиноли, мм
110
Диаметр пиноли задней бабки, мм
60
Внутренний конус пиноли задней бабки по стандарту DIN 228, мм
МК-4
Привод
Тип привода
с бесступенчатым регулированием
Количество основных ступеней привода
2
Число оборотов, об/мин
1 ступень: 30-850; 2 ступень: 0-3.500
Мощность электродвигателя, кВт (пост./30 мин)
7,0
Прочие характеристики
Номер лакокрасочного покрытия
RAL 7035 (серый) + RAL 7046 (тёмно серый)
Габаритные размеры и масса
Длина, мм
2.100
Ширина, мм
1.150
Высота, мм
1.500
Масса станка, кг
1.800
Скачать каталог в PDF
| Станина из серого чугуна |
| Электрический шкафБ |
| Закаленные прецизионно отшлифованные V-образные направляющие суппорта и верхней каретки |
| Высокоточные калёные ходовой винт и ходовая гайка |
| Высокооборотистый динамичный шпиндель с встроенным тормозным модулем |
| Ременный привод шпинделя и система автонатяжения |
| Механическое предохранительное устройство для резьбонарезания |
| 3-фазный асинхронный двигатель с электромагнитным тормозом и преобразователем частоты |
| 24 или 48 ступеней механизма подачи для установки нужной скорости подачи и резьбонарезания |
| Выключатель электропитания с блокировкой |
| Кнопка аварийного останова |
| Стальной кожух патрона с концевым выключателем аварийного останова станка |
| Защитный экран с окном |
| Поддон для хранения оснастки и инструментов |
| Рычаг управления продольной и поперечной подачей и рычаг зажима / разжима ходовой гайки не зависимы друг от друга |
Сделать заявку
Ваше имя *
Телефон *e-mail *
Текст вопроса
Модели машинного обучения: что это такое и как их создавать
Модели машинного обучения имеют решающее значение для всего, от науки о данных до маркетинга, финансов, розничной торговли и многого другого. Сегодня есть несколько отраслей, не затронутых революцией машинного обучения, которая изменила не только то, как работают предприятия, но и целые отрасли.
Сегодня есть несколько отраслей, не затронутых революцией машинного обучения, которая изменила не только то, как работают предприятия, но и целые отрасли.
Но что такое модели машинного обучения? И как они строятся?
В этой статье вы узнаете, как создаются модели машинного обучения, и найдете список популярных алгоритмов, лежащих в их основе. Вы также найдете рекомендуемые курсы и статьи, которые помогут вам освоить машинное обучение.
Что такое модель машинного обучения?
Модели машинного обучения — это компьютерные программы, которые используются для распознавания шаблонов в данных или для прогнозирования.
Модели машинного обучения создаются на основе алгоритмов машинного обучения, которые обучаются с использованием размеченных, неразмеченных или смешанных данных. Разные алгоритмы машинного обучения подходят для разных целей, таких как классификация или прогнозное моделирование, поэтому специалисты по данным используют разные алгоритмы в качестве основы для разных моделей. Когда данные вводятся в определенный алгоритм, они модифицируются для лучшего управления конкретной задачей и становятся моделью машинного обучения.
Когда данные вводятся в определенный алгоритм, они модифицируются для лучшего управления конкретной задачей и становятся моделью машинного обучения.
Например, дерево решений — это общий алгоритм, используемый как для классификации, так и для прогнозного моделирования. Ученый, работающий с данными, который хочет создать модель машинного обучения, которая идентифицирует различные виды животных, может обучить алгоритм дерева решений с различными изображениями животных. Со временем алгоритм будет изменяться в зависимости от данных и становиться все лучше в классификации изображений животных. В свою очередь, это в конечном итоге станет моделью машинного обучения.
Подробнее: Деревья решений в машинном обучении: два типа (+ примеры)
Как построить модель машинного обучения
Модели машинного обучения создаются алгоритмами обучения либо с помеченными, либо с немаркированными данными, либо с их сочетанием. Таким образом, существует три основных способа обучения и создания алгоритма машинного обучения: что алгоритм может успешно учиться на нем. Обучение алгоритма с помеченными данными помогает конечной модели машинного обучения узнать, как классифицировать данные в соответствии с пожеланиями исследователя.
Обучение алгоритма с помеченными данными помогает конечной модели машинного обучения узнать, как классифицировать данные в соответствии с пожеланиями исследователя.
Обучение без учителя: Обучение без учителя использует немаркированные данные для обучения алгоритма. В этом процессе алгоритм находит закономерности в самих данных и создает свои собственные кластеры данных. Неконтролируемое обучение полезно для исследователей, которые хотят найти закономерности в данных, которые в настоящее время им неизвестны.
Подробнее : 7 алгоритмов машинного обучения, которые нужно знать
Загрузка…
Контролируемое и неконтролируемое машинное обучение
Усовершенствованное машинное обучение и обработка сигналов
IBM
Заполненная звезда Заполненная звезда Заполненная звезда Заполненная звезда Полузаполненная звезда
4,5 (1208 оценок)
|
43 000 студентов зачислены
Курс 2 из 4 по углубленному изучению данных со специализацией IBM
Зарегистрироваться бесплатно
Что такое параметры машинного обучения?
Прежде чем исследователь обучит алгоритм машинного обучения, он должен сначала установить гиперпараметров 9. 0012 для алгоритма, которые действуют как внешние направляющие, указывающие, как алгоритм будет учиться. Например, количество ветвей в дереве решений, скорость обучения и количество кластеров в алгоритме кластеризации — все это примеры гиперпараметров.
0012 для алгоритма, которые действуют как внешние направляющие, указывающие, как алгоритм будет учиться. Например, количество ветвей в дереве решений, скорость обучения и количество кластеров в алгоритме кластеризации — все это примеры гиперпараметров.
Поскольку алгоритм обучается и управляется гиперпараметрами, параметры начинают формироваться в ответ на обучающие данные. Эти параметры включают веса и смещения, формируемые алгоритмом по мере его обучения. Окончательные параметры модели машинного обучения называются параметров модели, , которые идеально соответствуют набору данных без превышения или уменьшения.
В то время как параметры модели машинного обучения могут быть идентифицированы, гиперпараметры, используемые для ее создания, не могут быть идентифицированы.
Загрузка…
Параметры и гиперпараметры
Нейронные сети и глубокое обучение
DeepLearning.AI
Заполненная звездаЗаполненная звездаЗаполненная звездаЗаполненная звездаЗаполненная звезда
4,9 (118 382 оценок) 90 003
|
Зачислено 1,2 млн студентов
Курс 1 из 5 специализации глубокого обучения
Зарегистрируйтесь бесплатно
Типы моделей машинного обучения
В машинном обучении преобладают два типа задач: классификация и прогнозирование.
Эти проблемы решаются с использованием моделей, полученных на основе алгоритмов, разработанных либо для классификации, либо для регрессии (метод, используемый для прогнозного моделирования). Иногда один и тот же алгоритм можно использовать для создания моделей классификации или регрессии, в зависимости от того, как он обучен.
Ниже вы найдете список общих алгоритмов, используемых для создания моделей классификации и регрессии.
Модели классификации
Логистическая регрессия
Наивный Байес
Деревья решений
- 90 002 Случайный лес
K-ближайший сосед (KNN)
Метод опорных векторов
Регрессионные модели
Подробнее о машинном обучении
Независимо от того, хотите ли вы стать специалистом по данным или просто хотите углубить свое понимание нейронных сетей, зачисление на онлайн-курс поможет вам продвинуться по карьерной лестнице.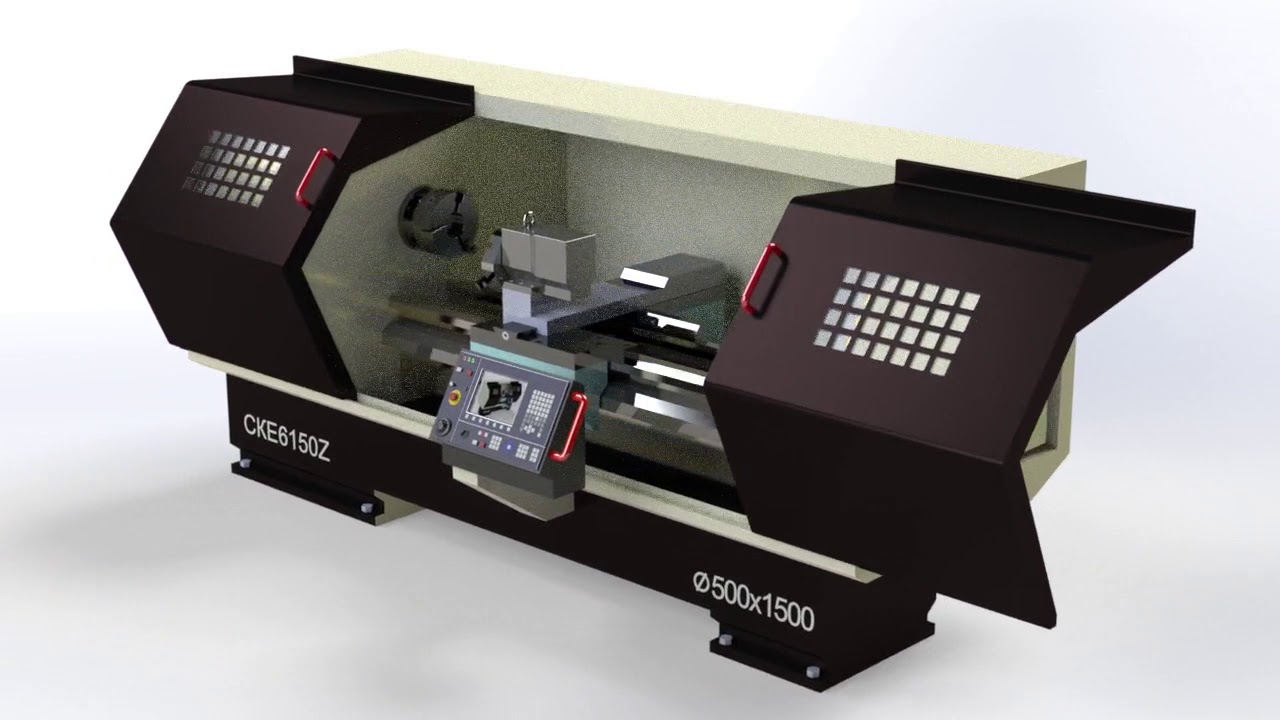
В Стэнфорде и специализации DeepLearning.AI по машинному обучению вы освоите фундаментальные концепции искусственного интеллекта и разовьете практические навыки машинного обучения в удобной для начинающих программе из трех курсов, разработанной провидцем в области искусственного интеллекта Эндрю Нг.
Тем временем специализация глубокого обучения DeepLearning.AI научит вас создавать и обучать архитектуру нейронной сети и вносить свой вклад в разработку передовых технологий искусственного интеллекта.
специализация
Машинное обучение
#BreakIntoAI со специализацией по машинному обучению. Овладейте фундаментальными концепциями искусственного интеллекта и отработайте практические навыки машинного обучения в удобной для начинающих программе из трех курсов, подготовленной провидцем в области искусственного интеллекта Эндрю Нг Среднее время: 3 месяца
Учитесь в своем собственном темпе
Навыки, которые вы приобретете:
Деревья решений, искусственная нейронная сеть, логистическая регрессия, рекомендательные системы, линейная регрессия, регуляризация во избежание переобучения, градиентный спуск, обучение с учителем, логистическая регрессия для классификации, Xgboost, Tensorflow, ансамбли деревьев, советы по разработке моделей, совместная фильтрация, обучение без учителя , Обучение с подкреплением, Обнаружение аномалий
Автор: Coursera • Обновлено
Этот контент был доступен только в информационных целях. Учащимся рекомендуется провести дополнительные исследования, чтобы убедиться, что курсы и другие полномочия соответствуют их личным, профессиональным и финансовым целям.
Что такое модель машинного обучения?
Редактировать
Твиттер
Фейсбук
Электронная почта
- Статья
Модель машинного обучения — это файл, обученный распознавать определенные типы шаблонов. Вы обучаете модель на наборе данных, предоставляя ей алгоритм, который она может использовать для рассуждений и извлечения уроков из этих данных.
После того, как вы обучили модель, вы можете использовать ее для анализа данных, которых она раньше не видела, и делать прогнозы относительно этих данных. Например, допустим, вы хотите создать приложение, которое может распознавать эмоции пользователя по выражению его лица. Вы можете обучить модель, предоставив ей изображения лиц, каждое из которых помечено определенной эмоцией, а затем вы можете использовать эту модель в приложении, которое может распознавать любую эмоцию пользователя. Пример такого приложения см. в образце Emoji8.
Например, допустим, вы хотите создать приложение, которое может распознавать эмоции пользователя по выражению его лица. Вы можете обучить модель, предоставив ей изображения лиц, каждое из которых помечено определенной эмоцией, а затем вы можете использовать эту модель в приложении, которое может распознавать любую эмоцию пользователя. Пример такого приложения см. в образце Emoji8.
Когда использовать машинное обучение
Хорошие сценарии машинного обучения часто обладают следующими общими свойствами:
- Они включают в себя повторяющиеся решения или оценки, которые вы хотите автоматизировать и которые требуют согласованных результатов.
- Трудно или невозможно явно описать решение или критерии, лежащие в основе решения.
- У вас есть размеченные данные или существующие примеры, где вы можете описать ситуацию и сопоставить ее с правильным результатом.
Машинное обучение Windows использует для своих моделей формат Open Neural Network Exchange (ONNX).
